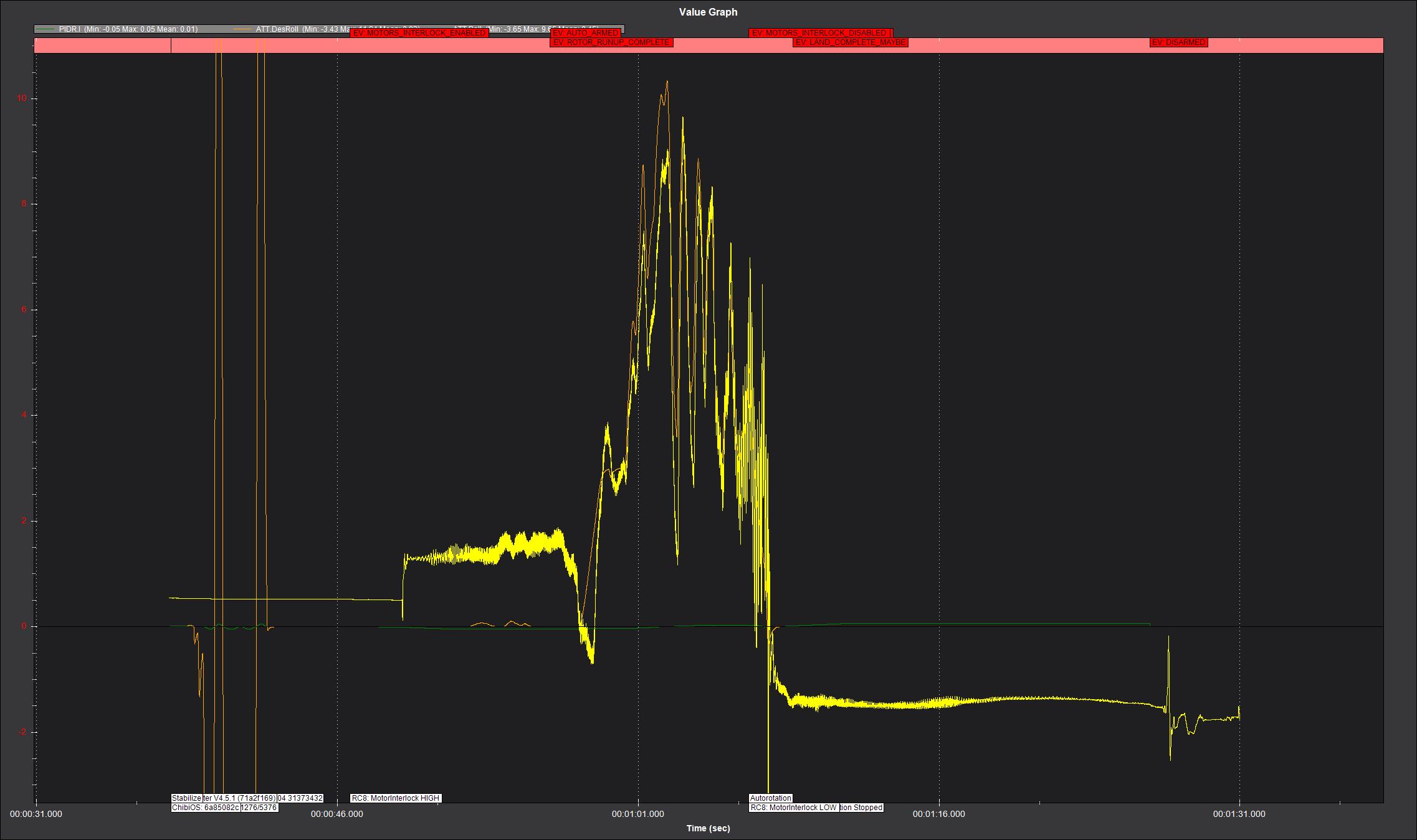
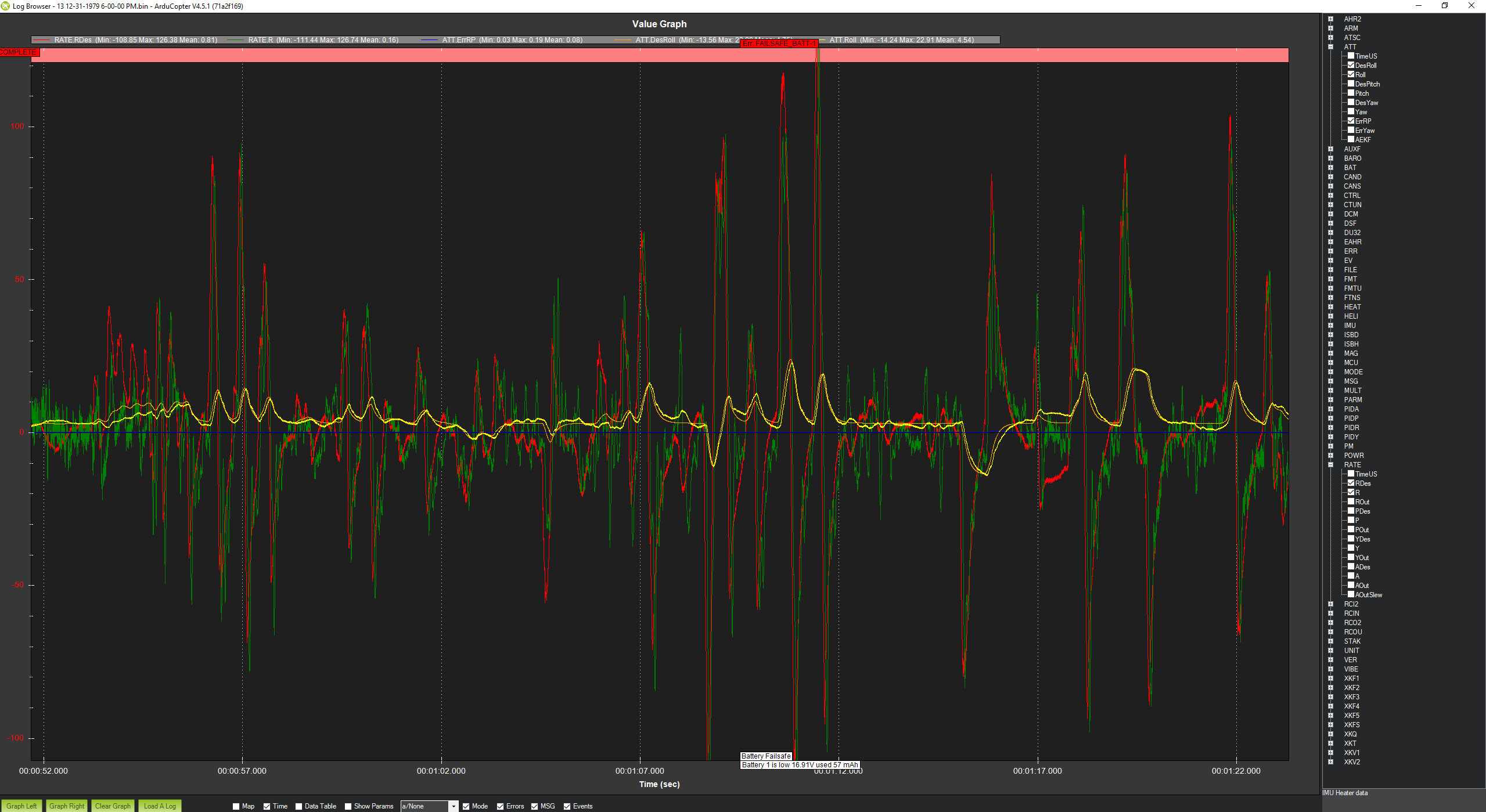
I am testing out the CUAV Nora+ flight controller with ArduPilot on my Trex 450L Dominator heli. Flights were going well on my first tests (See Logs 1 or 2), as they were running on low head speed. But when I set the heli for a high headspeed (78% throttle) the heli immediately goes into an aggressive wobble upon reaching its set headspeed (see log 4). I had not set any filtering or made any tuning adjustments at this point. All tuning is at its default.
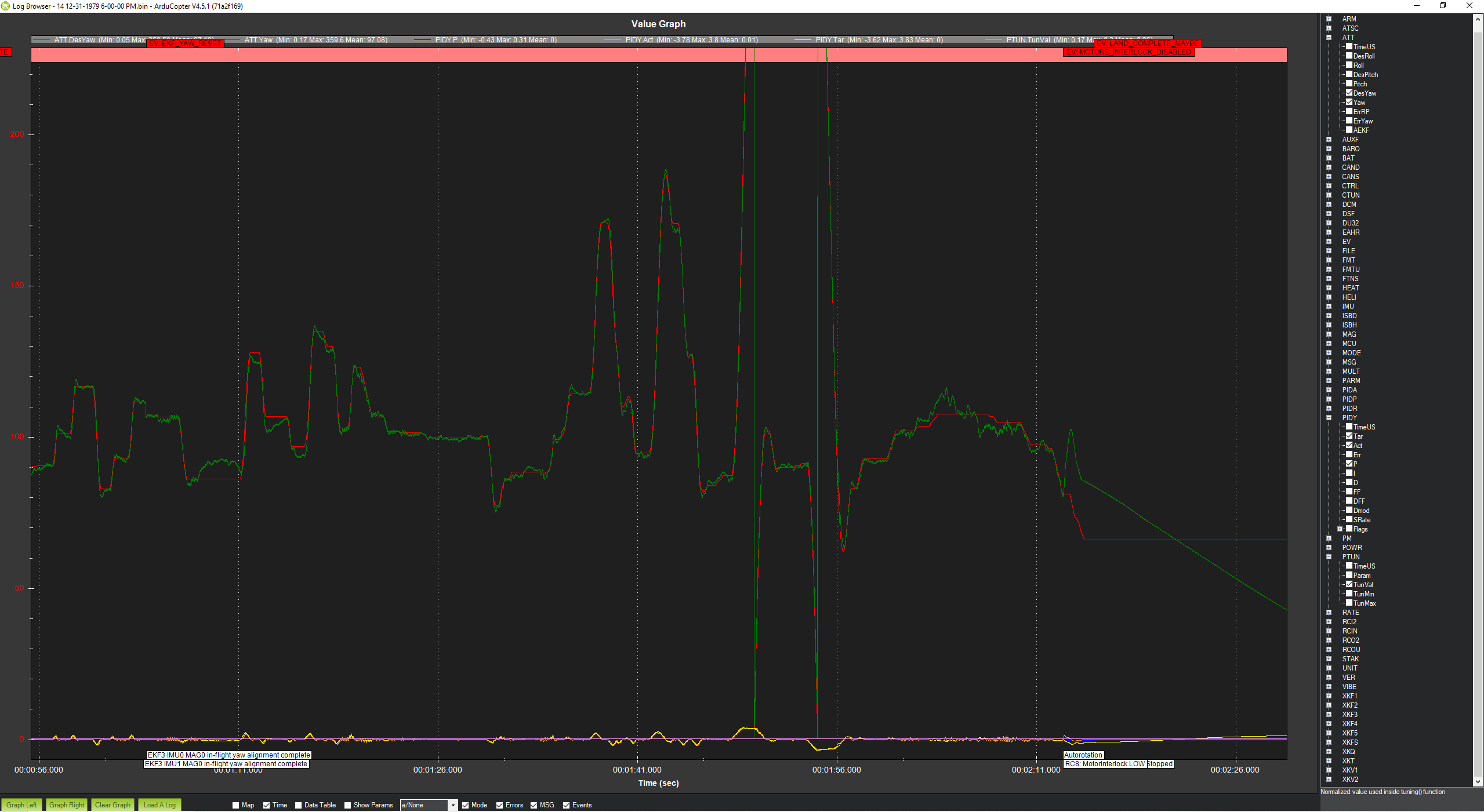
My goal has been to progress through the tuning process by performing a first flight, then proceed to add notch filtering and custom tuning. Just now, I added some notch filtering, but didn’t see a change in the heli performance, still seeing the same wobble (see log 6). It did seem however that the heli control response had become slightly delayed. Hopefully the addition of a single notch filter isn’t delaying CPU processing.
The notch filter I set up has the following parameters
INS_HNTCH_ATT: 40
INS_HNTCH_BW: 40
INS_HNTCH_ENABLE: 1
INS_HNTCH_FM_RAT: 1
INS_HNTCH_FREQ: 132 (132 Hz center frequency)
INS_HNTCH_HMNCS: 31 (Harmonics 1, 2, 3, 4, and 5)
INS_HNTCH_MODE: 0 (Fixed Mode)
INS_HNTCH_OPTS: 0
INS_HNTCH_REF: 0
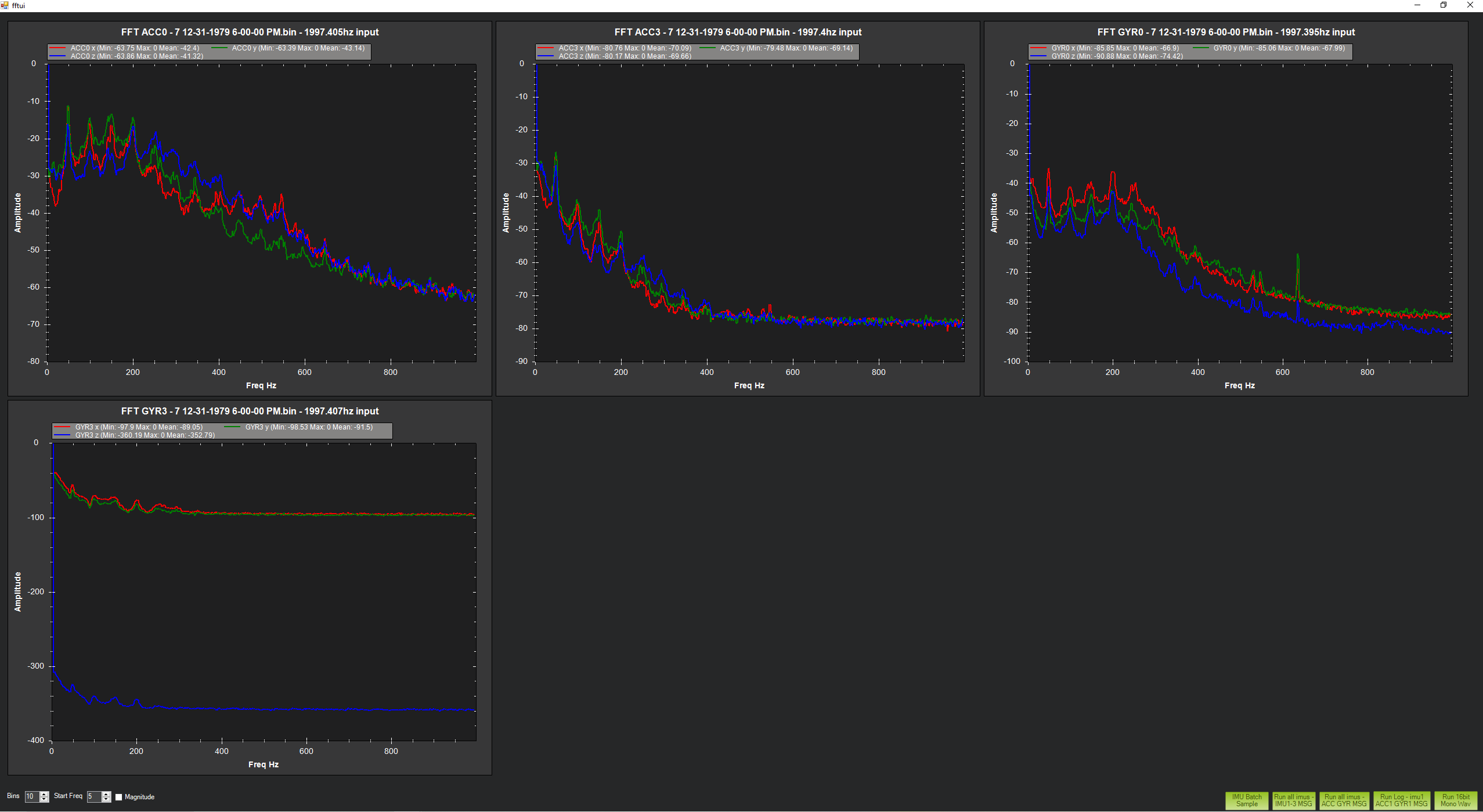
My vibrations may still be a bit high. But I am thinking this wobble is more of a control response issue. Would this problem likely be resolved after providing values for P-gain and maybe D-gains? My I-gain is also a little low, and could be increased. Or the problem may be that I still have the default low-pass filter setting of 20Hz.
This is my first attempt at setting up an ardupilot heli. So I am probably just missing a basic tuning step. There is a lot of information when it comes to tuning, so it’s beginning to go a little over my head.
LatestParameters.param (20.4 KB)
Flight Logs and some IMU Graphs