I suggest to not use mode 1. Ideal would be to use ArduCopter internal governor (so mode 4). ESC governors are good but you might see some rpm setpoint difference between flights with different batteries-with a “tight” attitude tune you might see what I mean if rpm’s are different from what you have tuned it on.
For Acro mode, I would suggest starting lower on this, 200 deg/s is a better starting point for almost any model size aircraft .
@bnsgeyer Bill, I am moving this setup over to the E1 900, Tri-blade heli. I am planning to use RSC mode 4. The heli is electric, but I am utilizing RPM feedback from the ESC. RSC mode 4 is intended for gas or turbine powered helis, but I figure this will be a good choice if I want some control of the head-speed at takeoff and landing.
Is there any reason this would be a bad idea for use with an ESC?
I am in the middle of setting the min and max collective, as well as the maximum cyclic. This E1 900 is mechanically limited. But I certainly don’t need fast maneuvers out of it either.
The maximums that I have come up with are:
Max Collective: 7 deg
Min Collective: -4 deg (min could be more if wanted)
Collective when landed: -3.5
Max Cyclic: 4 deg (1500)
Then I do have the zero-thrust angle at -1 for the non-symmetrical blades.
Should fly well with those settings. For a large docile drone anyway.
How exactly does ArduCopter determine that the helicopter has landed? I hope it doesn’t disarm if I go into an auto-gyro. I do have manual auto-gyro enabled.
Yes, confirm. Been using the mode 4 with both hobbywing and BLheli type of ESC. Works awesome.
I’d suggest -if using HobbyWing ESC- set it up as simple airplane esc , so get rid of soft start and governor. Use the settings in ArduPilot for smooth run up/ramp up .
I’d suggest to increase max collective to 9 degs.
Also set your minimum collective to -5 degs.
I’d suggest to increase this to 6degs.
Don’t worry, it will not disarm mid flight in autorotation. But I strongly discourage trying autorotations with the Demeter, especially the three blades version. It has some bad habits if you don’t manage to get it perfectly straight and almost no forward speed at touchdown (main mast too short, landing skid too tall).
One final advice, aim at an headspeed of 1300-1350 rpm max. Beyond that the axial bearings won’t last long.
These values are mechanically impossible unless I lengthen the control arms between the swash and the head. Not sure I want to do that. At max collective, cyclic has very little room, and cannot go full travel.
Just be aware that depending on your payload weight you might be reaching the top limit very quickly. The manufacturer recommends 9 degs for max collective pitch.
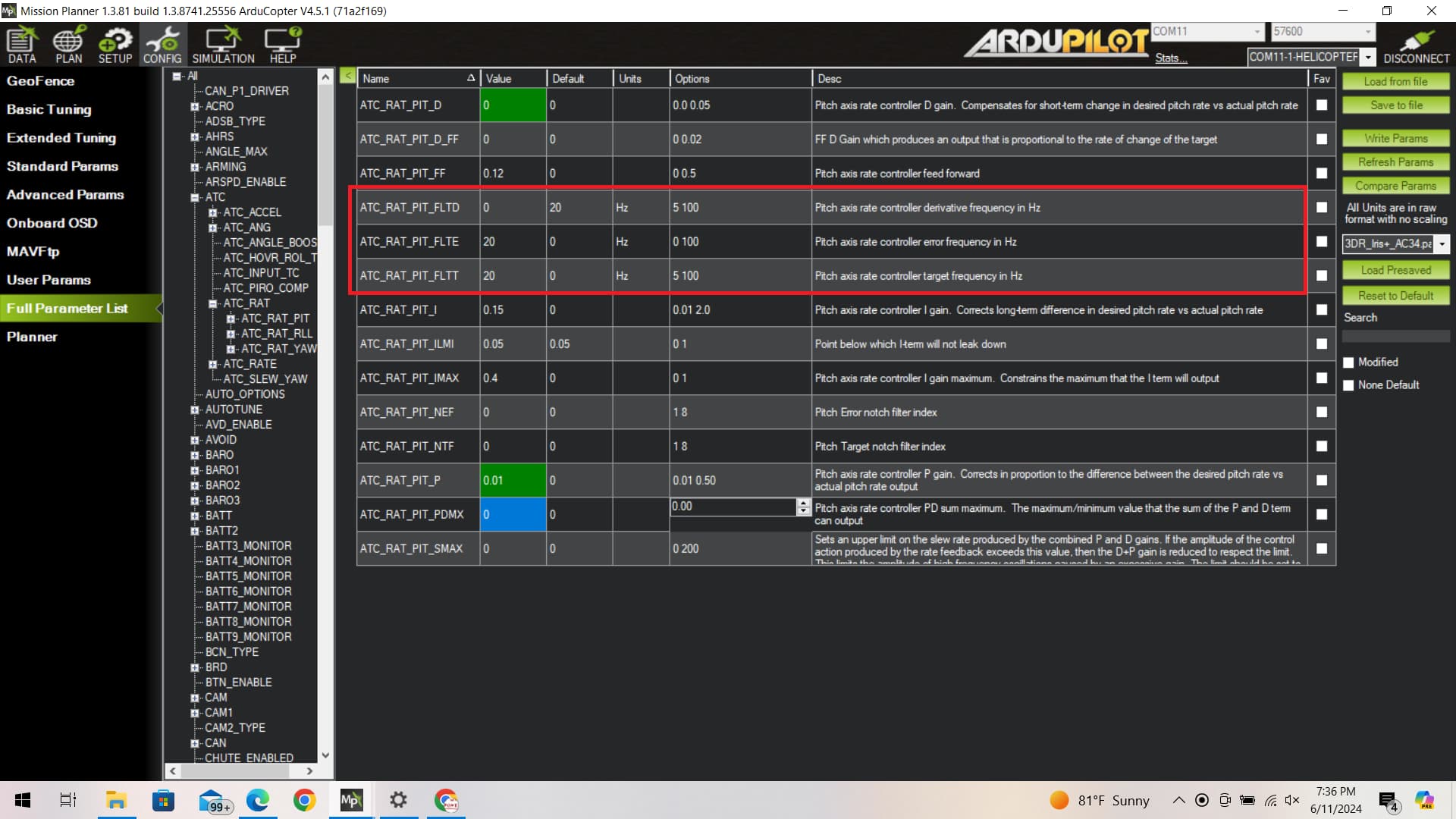
I was just noticing the ATC_RAT_x_FLTx parameters. I’m not sure what these are, but they are currently set to opposite their default values. Not sure why. Should I set these to their defaults values? I don’t know how critical these are.
Derek,
Sorry, the default values shown there are not correct. The firmware loads with the defaults the first time you flash it onto a controller. I will have to go into the code and correct those. Definitely continue to use the full parameters list as it allows you to override settings that the tuning wiki will have you make. In some cases, Mission Planner tries to push multirotor values which are not correct for heli. Please follow the tuning guide.
Hmmm , I might have made some adjustments in the multirotor setup soon after loading the Arducopter firmware. Might be a good idea for me to do a parameter comparison between my current state and a fresh Arducopter install.
I decided to go ahead and adjust the upper turnbuckles to allow for higher collective pitch. I moved them from the initial 20.5mm to 22mm. I don’t like decreasing the thread hold, that’s about as far as I want to go. Still have a good thread hold at this point.
With this change, I am now getting 8.3 degrees collective, and 5 degrees cyclic.
I want to compare my current parameters with those of a fresh ArduCopter flash. In which case, I’d like to re-flash my Nora+ flight controller.
As long as I reload my previous parameters there is no re-setup or recalibration required, correct? All heat calibration, accelerometer calibration and so forth is completely saved in the saved parameters file? I can go out and fly as though nothing changed, as long as the full parameters list is loaded back in?
Or if setting all parameters to default is correct, I can do that.
This is correct for what pertains the basic calibration of IMU / compass and so on. Not sure about your specific heli/ atc/ servo setup as we’ve not seen the mentioned params set.
The effect of hitting “reset to default” is that it will wipe out all of your parameters and set them to default value- not the values you have obtained after initial calibrations. So I wouldn’t do that unless you want to have a fresh start over.
I did reset all parameters. took a few rewrites to fill in the parameters hidden by enables. It did also make me redo the 3D calibration. I don’t know if that was due to the reset, or if it didn’t like my initial flight controller 3D calibration. That was fun, trying to 3D calibrate this giant heli, but I got it level on all sides!
Just did the first tracking test and hover! Wow, this thing is awesome! I haven’t flown anything this big. Can’t believe it takes off so beautifully at such a low head-speed, and weighing 27lbs!
I just removed this log. It had GPS data on it. Is there a way to go back in to a log file and remove GPS data, or anonymize it? I’ll turn off GPS tracking before creating more shared log files.
I was reading through the tail rotor setup instructions. I have a servo-only tail (H_TAIL_TYPE = 0). Running on Arducopter 4.5.1, is Col2Yaw the only method for setting the tail? Or is it still acceptable to set the tail servo trim to compensate the offset, leaving Col2Yaw = 0?
My yaw I parameter is maxing out with Col2Yaw = 0.5.
Set that param to zero for now. I have to come up with better instructions to set this param. I typically mechanically set the trim tail collective to the hover value which occurs with the servo centered (1500 pwm).
It would be helpful to see a log with pid logging enabled. If you have a two blade tail rotor- I’m not surprised you close to maxing out on this. It was the very first upgrade I did on that machine to switch to 3 blade tail rotor (I haven’t kept up recently with the tons of “quiet” mods Align come out with on their kits ).