The copter wobbles when transitions from Att to loiter mode and then stabilize itself what could be the cause and how to fix it?
No .bin log file… no cookie. Haven’t you read any posts in this forum? We always ask for log files!!!
Here are the logs
https://drive.google.com/drive/folders/13JR9AKqPw0ioaJZzIuQNrE_z1CPjOPe6?usp=sharing
Please describe the aircraft: frame size, motors, props, ESCs, battery…
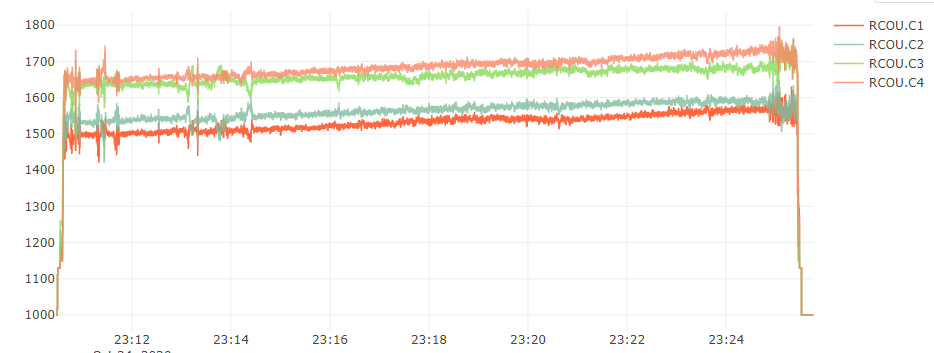
There’s a physical yaw bias. Clock-wise motors are working harder to fight the yaw. Most common cause is motor mounts twisted on round arms.
This means the flight controller has less headroom to maintain altitude and stability.
Current monitoring seems wrong, 3 to 4 amps to hover is very low. Do you want to sell those motors, props and ESCs ? 
I’d probably change LOIT_BRK_DELAY from 0 to a positive value like 0.3
Set all these too:
BATT_ARM_VOLT,14.7
BATT_CRT_VOLT,14
BATT_LOW_VOLT,14.4
MOT_BAT_VOLT_MAX,16.8
MOT_BAT_VOLT_MIN,13.2
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
After you fix the yaw bias and those other values, run an autotune again and then lets see the log file.