Hi, i have copter and I want to do waypoints navigation with different WP radius accuracy. How can I do that ? For example if I have 30 waypoints and 3 of them are the most important ones. How can I edit the radius for these waypoints?
I am using mission planer.
Waypoints can have different radius
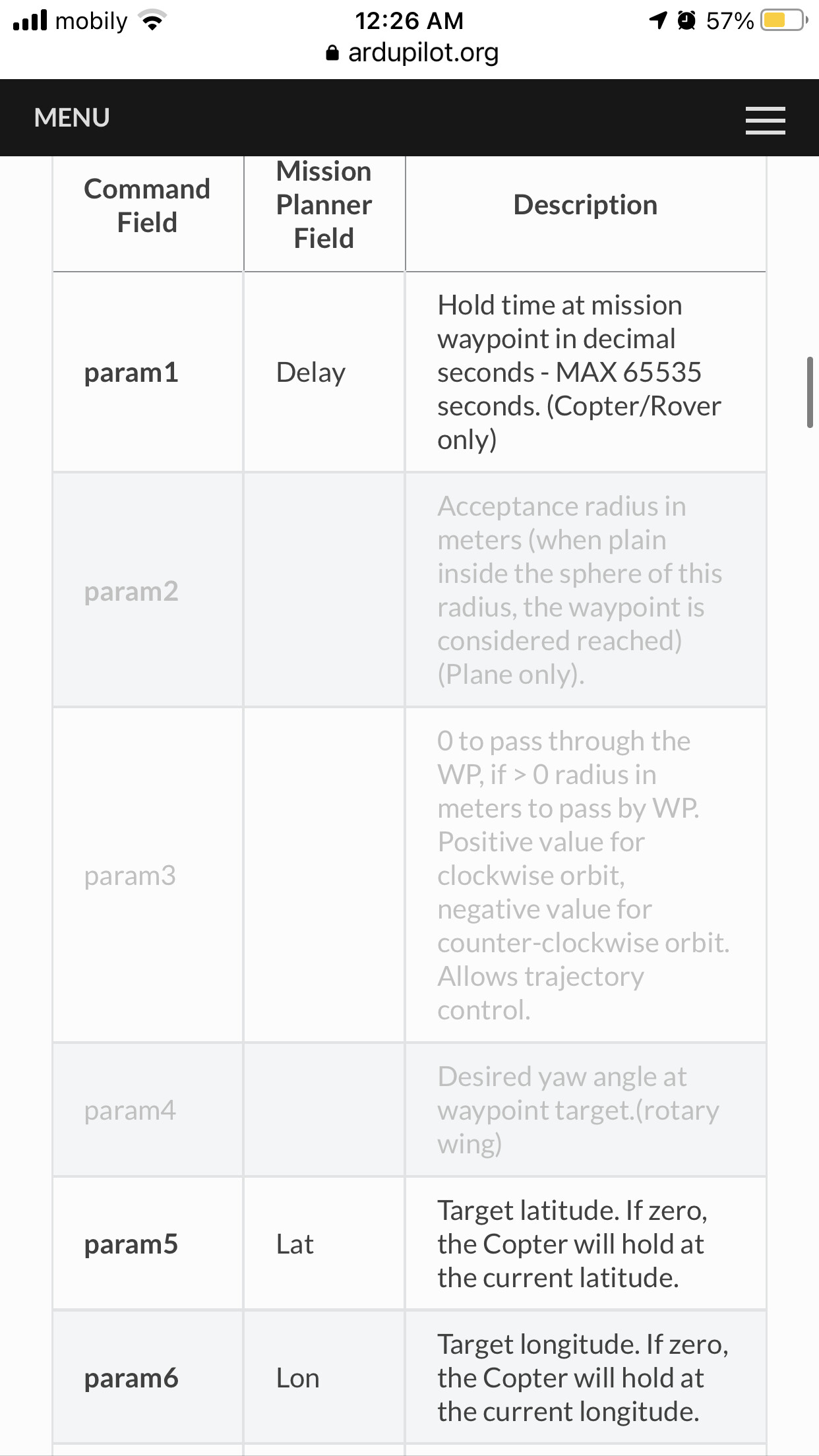
https://mavlink.io/en/messages/common.html#MAV_CMD_NAV_WAYPOINT
Isn’t this for plane only ?
Seems like it is not supported yet.
I tried this in Mission Planner too and even I’m setting a nonzero radius vehicle sends me the exact command with zeroing the field.
I will test it in Mavproxy to be sure.
It might be a good idea to implement it on ArduCopter if not exist.
Probably this is not an MP issue but the firmware does not support it yet.
Command is
MAV_CMD_NAV_WAYPOINT
So, is there a solution to my problem?
The DELAY command in a mission should work and allow the copter to settle on the waypoint.
Otherwise you have to find a way of changing WPNAV_RADIUS during the mission, maybe scripting??
1 Like
WPNAV_RADIUS should probably be left as a nav tuning parameter in favor of a mission delay.
1 Like
So, the only way is using delay command.
Will ardupilot put this feature in copter as well? In terms of waypoints radius control.
So, I implemented this feature and did the PR.
I don’t know (when) will it be accepted (or not) 
This significantly reduces the hold time to a maximum of 255 seconds.
But people who want more can do NAV_LOITER_TIME.
Hi @montathar111,
What’s the purpose of having different waypoint radius value for each waypoint? I think if you test with 4.1 (or higher) you’ll find that it doesn’t actually make much difference to how the vehicle flies the path. For the 3 important ones if a delay of 1 second (or higher) is set the vehicle will precisely pass through the waypoint without cutting the corner.