I have been having issues recently (previously the copter would fly okay).
I fitted on motor soft mounts* to check if they reduced vibrations.
When I performed the first flight, the copter took off in alt hold. I wanted to hold an altitude of 1 metre.
But the copter kept going up and up and up.
Since then I have repeated this and copter just wants to go up and up.
To drill this down I noticed that the desired altitude was correctly calculated by my copter (ie. it wanted to hold alt at around 1m). The issue was that the actual altitude went up and up and this is what happened in reality.
In order to prevent the copter from flying into space, I am now tying it to the ground and disarming the copter, mid flight. This is the only way I can bring the copter back to the ground.
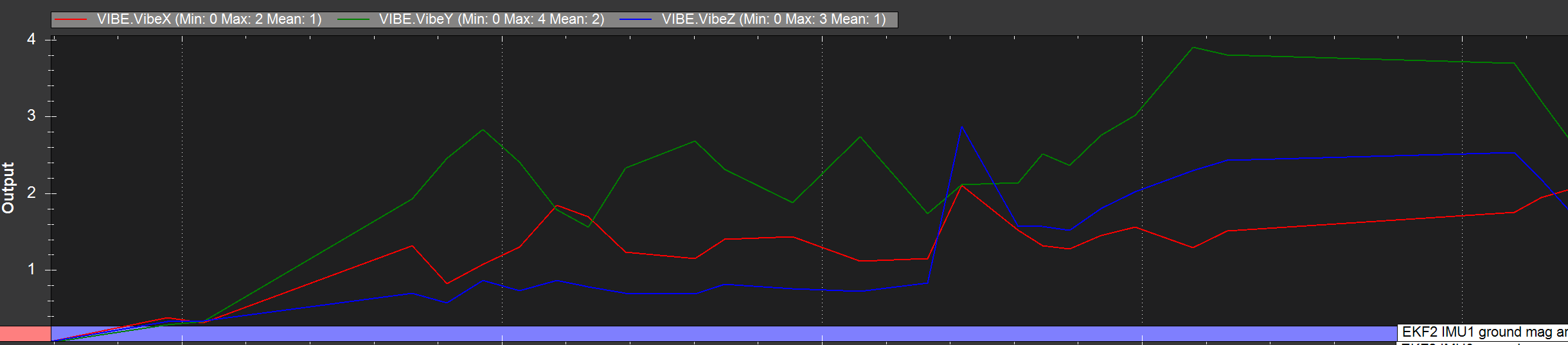
And here is a vibration graph. It seems okay to me.
The .logfile for the flight can be found here. (click the link and in the window which opens, click the download arrow, in the top right hand corner of the window).
Can anyone give me any ideas of why this is happening? The copter seems to be sending too much power to the motors, even though it knows it shouldn’t.
Thanks
*Surely the issue can’t be the motor soft mounts…could it?
-what you describe is often caused by insane Z vibrations. - can’t see that in this log, so it had to be a previous flight…
-if the minimal log you posted is an actual flight, with battery, check, and reduce your MOT_SPIN_MIN , try 0.09 to begin with…
The flight itself lasted only a few seconds.
I armed, sent the copter up - it quickly ascended and I had to cut the power.
Had I allowed it to continue to climb to say 10m, cutting the power from that high would’ve destroyed the copter when it fell to the ground. This is why I was cutting the power at around 1.5-2m.
Like you said, the erratic z-axis is what I would expect of a lot of vibrations BUT, as the graph for the vibe shows, the vibrations are “okay”.
I can certainly reduce the MOT_SPIN_MIN, but what is your thinking here?
The log file I posted above contains vibe data. I also posted a graph, with vibe data for all 3 axis.
I can’t fly the copter for more than a few seconds, as it is ascending very quickly and if I allow it to go for say 10 seconds, it’ll be destroyed when I disarm in mid-air. Disarming during flight is the only way I can bring the copter back to the ground. It is currently over-powered (camera and gimbal have not yet been fitted), which is why it is able to climb so quickly.
I have tried to fly the copter a few times and every single time, the same result.
This all started since I fitted motor soft mounts. It makes no sense that soft mounts could be causing this.
This is what they look like:
Tomorrow, I think i will
1, try removing the soft mounts (first).
2, If that doesn’t sort the issue, I will re-mount the flight controller.
…but I need ideas from more experienced people who can point me in the direction to investigate.
You may try flying in Stabilize - this will allow you to control the altitude with the throttle and have a recourse other than disarming if AltHold isn’t working.
I removed the soft mounts.
Then re-mounted them.
I have some test results for soft mounting motors vs not.
When soft mounting, I also used 0-rings on the bolt heads.
in conclusion: there is very little difference. In fact, I would say that no soft mount is marginally better.
I will be conducting further tests over the next week. Bear mind though, that the flight controller is soft mounted, so a lot of the vibration might be getting removed by the FC mount. If the FC is hard mounted, then soft mounting the motors may help.
i will be hard mounting the flight controller and running further tests, but early results suggest not to soft mount the motors.
The issue with this strategy is that because the copter is so over-powered, it is almost impossible for me to control the altitude in STAB mode.
What I did do though, is turn down the MOT_SPIN_MAX value, to around 0.6, to prevent the air craft from rocketing off into the air.
However, when I removed the soft mounts, the problem cured itself. I have no idea how/why, but it did.