Hello,
We had a copter lose gps signal and land in the middle of a forest eventhough we had set FS_EKF_ACTION = 2
Using a Hex Blue Cube in the setup and Arducopter 3.6.12
Any idea why this would happen?
Log file needed.
Corrado
Hello,
Here is link to the log
https://drive.google.com/file/d/1jllY_nTLrrqCv2iMMa53JX-1APE7bIQg/view?usp=sharing
Any ideas on this problem?
The copter landed in the forest and got a bit damaged.
Would like to fix this before we fly again.
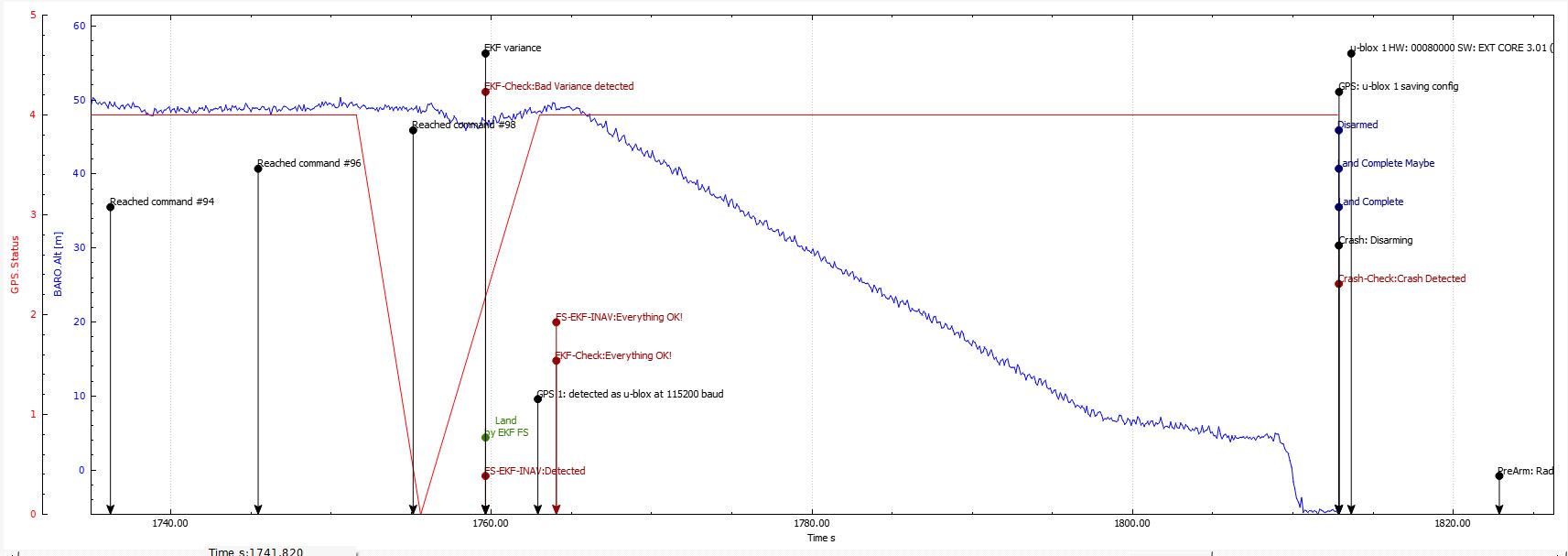
The GPS stopped working for ~12s and FS action switched to Land. W/o a GPS signal it will drift with the wind as it’s landing. The GPS signal recovered but by time it was initialized it was too late.
Thank you very much, the copter had two gps units. We’re guessing the other one isn’t working properly.
Will have to test them both.
I think you are right. Only GPS 1 is being recognized.
Okay thank you for the information.
But why didn’t it go in alt hold where gps is not needed and EKF FS was set to go (option 2)?
Is there a parameter which overrides the failsafe and forces the copter to land?
Well, that’s a good question. Indeed, why did it choose Land and not AltHold. 3.6.12 seems like a long time ago…