The six-rotor drone uses copter 4.4.2 firmware and has been flying normally for a month without any problems. Today I added a device to the tripod of the drone. I unlocked the drone as usual. In althold mode, as soon as the throttle passed 50%, the aircraft immediately rose rapidly at 100% throttle. It was completely uncontrollable. In the end It fell quickly again and crashed. I exported its flight logs in hopes of finding the cause.
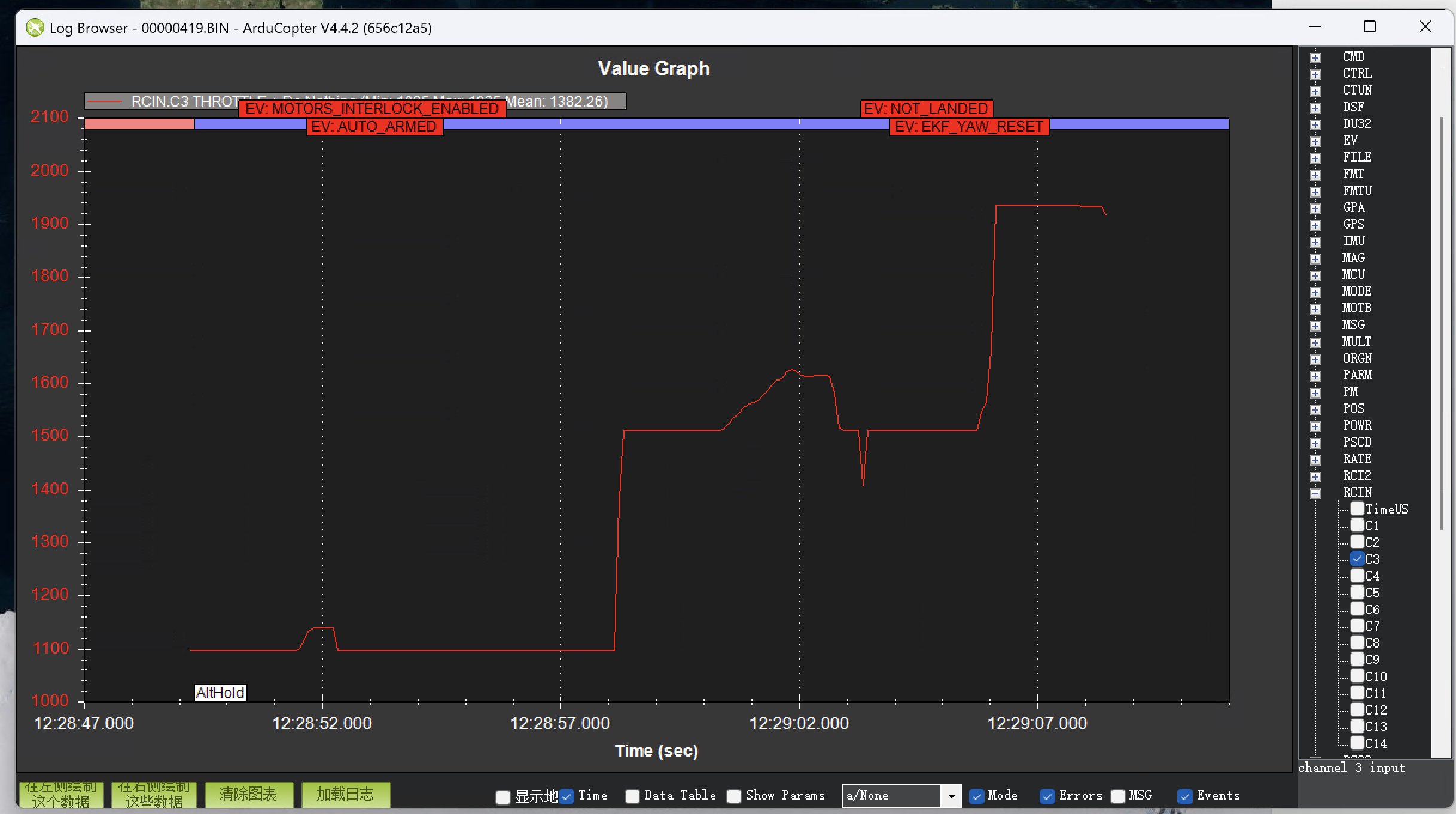
What I am very confused about is that I only maintained 60% throttle, but the motor rose rapidly at 100% throttle. Why did the altitude change so drastically?
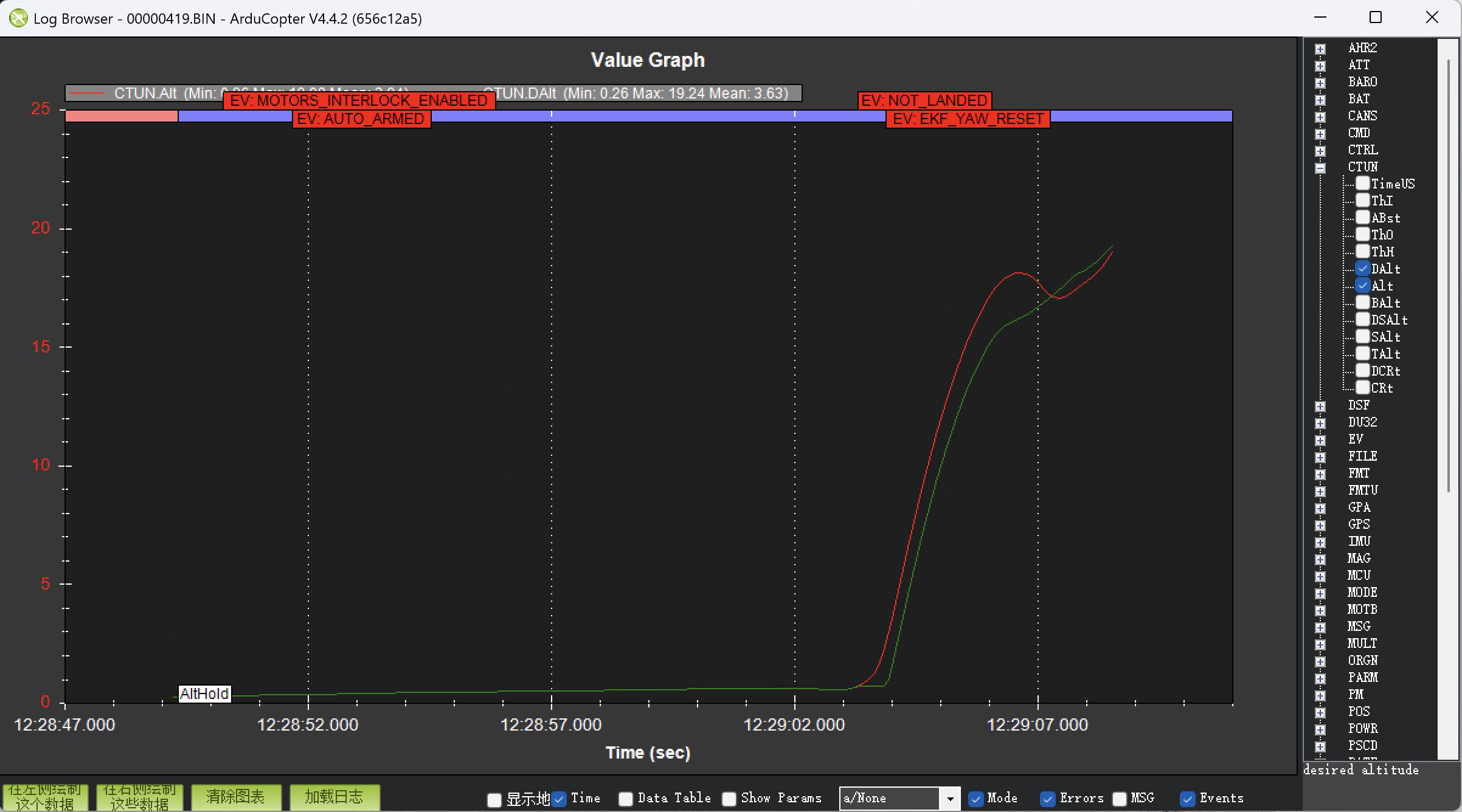
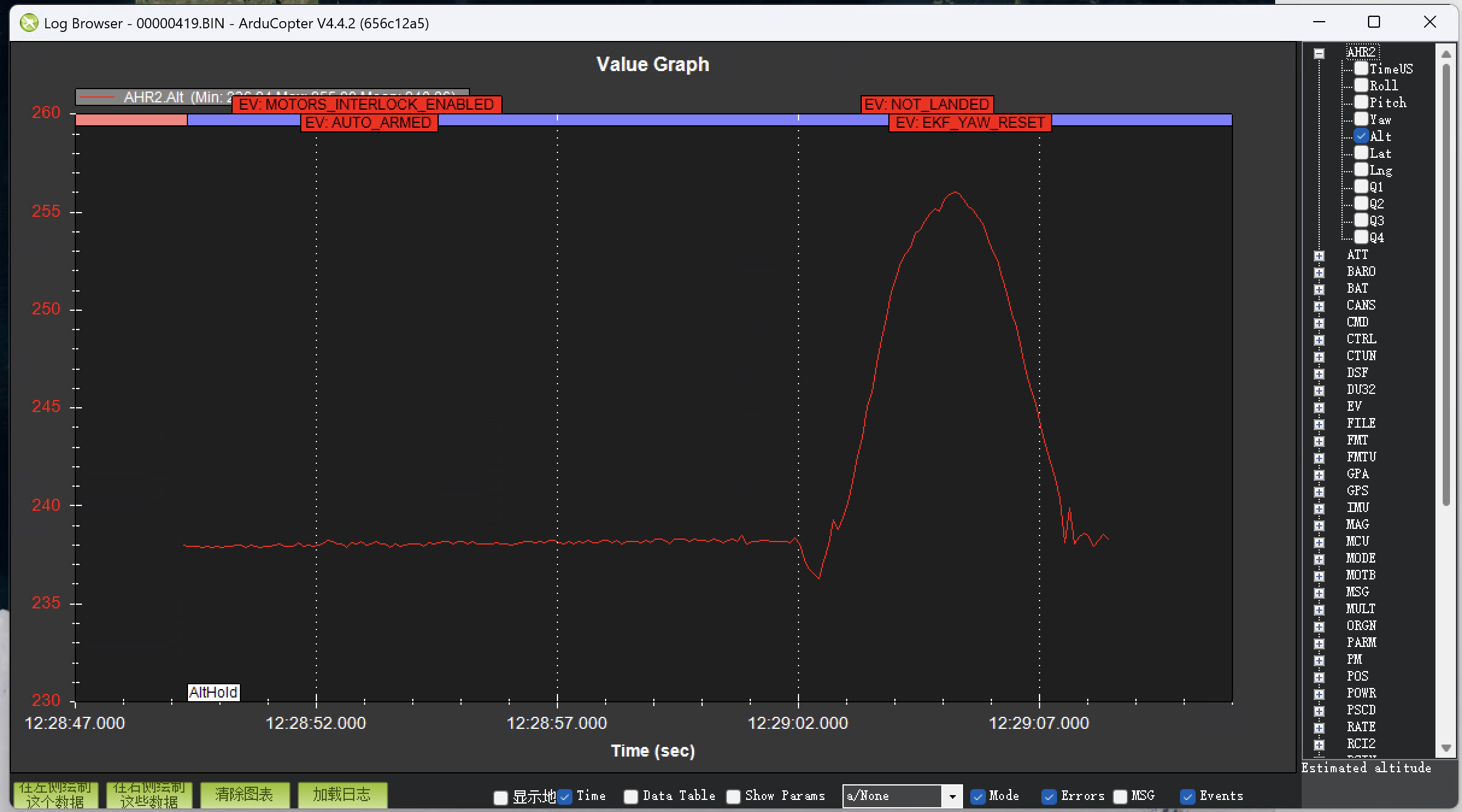
The altitude change in AHRS2 is very different from the altitude change in CTUN. The real altitude change is that the aircraft experiences a rapid climb and then a rapid descent. But in CTUN, the height is always above 15 meters, which is wrong.
When you add payload that can vibrate you need to either ensure that it does not vibrate by modifying the hardware or you need to reconfigure the notch filter, possibly adding a new static notch at the payload fundamental frequency
I also believe that this is a vibration failure caused by the increased load. Another possible reason is that my PID sensitivity is very high, and its flight stability was very good before the load was increased.
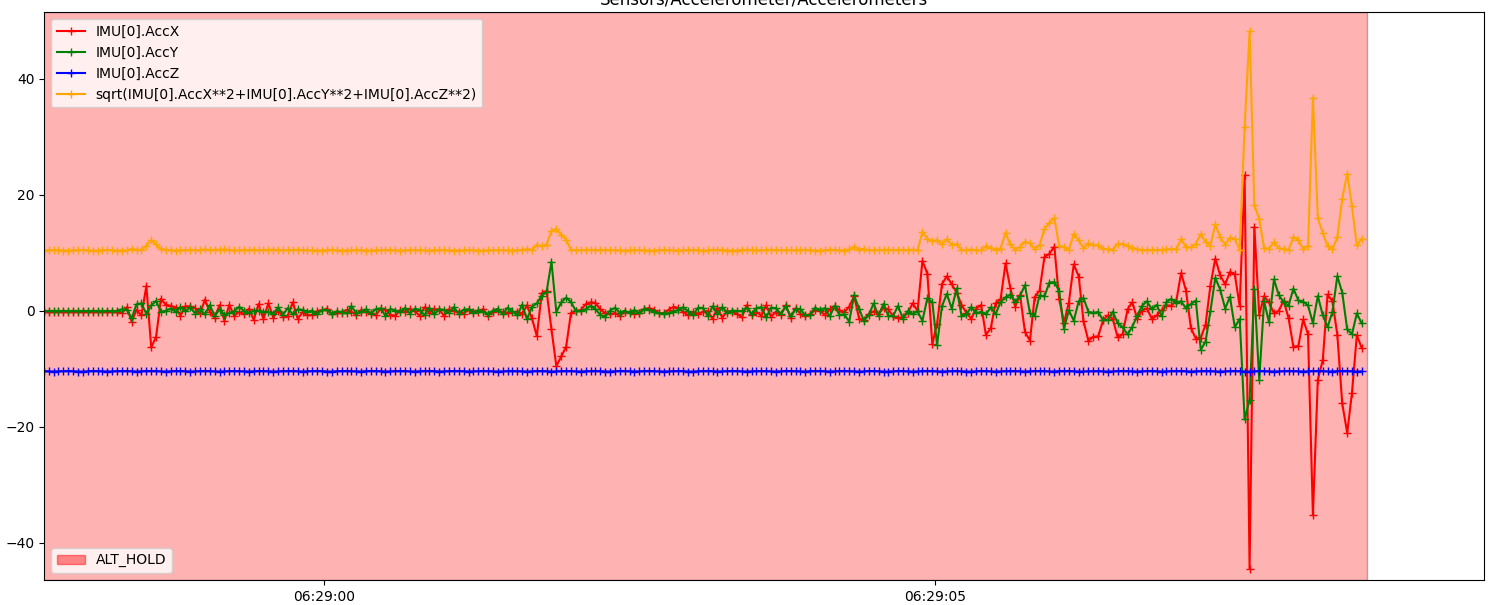
Apparently it was not vibration. Your accelerometer failed, there were no change in AccZ. No suprise it skyrocketed.
Why on earth you fly a big expensive vehicle with ONLY ONE IMU ?
Thank you very much for finding the real cause of the accident for me. I just reinstalled the flight control on another aircraft and the flight was normal, but obviously there is a certain probability of the accelerometer failing. I should consider replacing it. flight control and add multiple IMU redundancy to it.