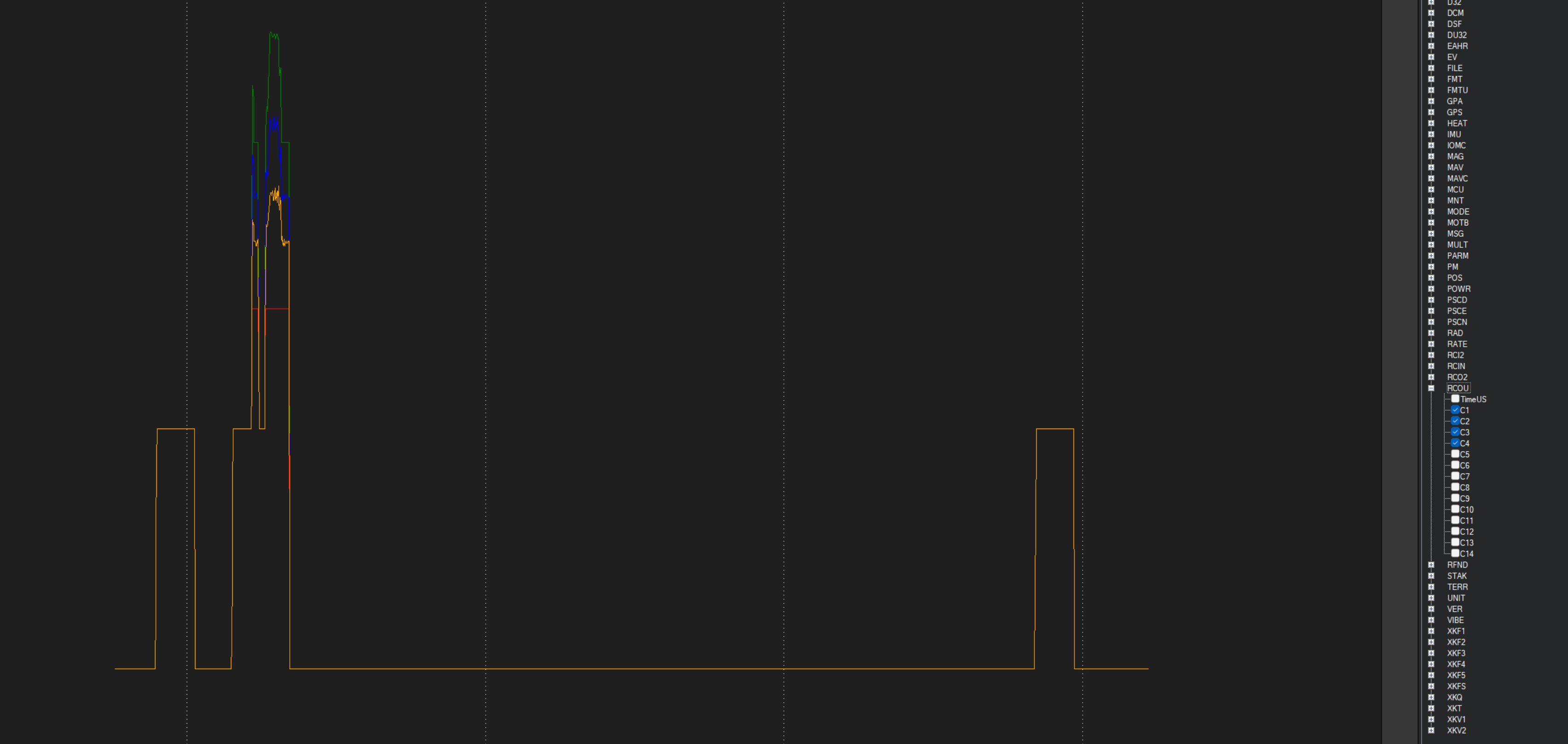
you can check the log file to see the RPM spin, how are they spinning. under RCOUT (pwm output to individual RC outputs):
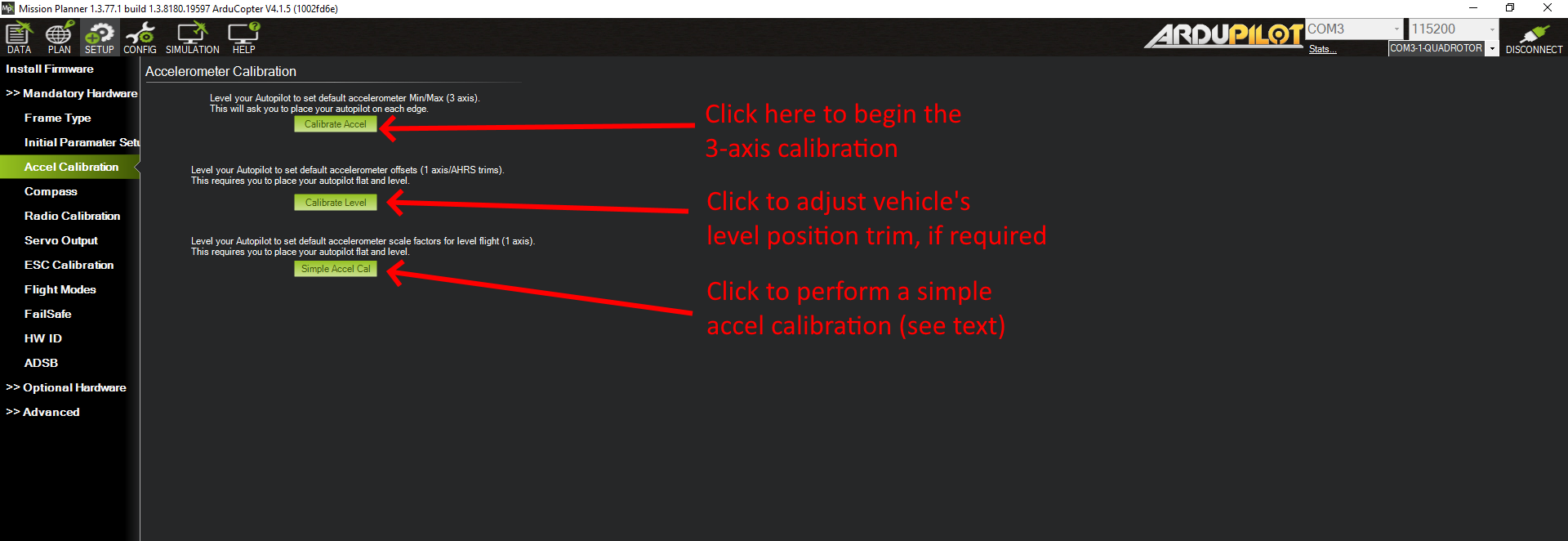
you can also place the drone on a flat sea level plane and do a simple Accel Cal to see it improve the situation.
please also double check the Motor pin assignment.
I think you could have underutilized the carrier board capability for a Quad configuration.
Your Cubeorange seems to have a lot of errors. You may want to solve that first.
Have you flown a full manual drone before?
Are you setting up a 7" propeller drone using Cube Orange + Kore carrier board?
Has the CubeOrange been injured (drone crash) before?
I would recommend turning off (via parameter) the unnecessary lidars for the first flight test. Turn them back on after tuning is completed.
Secondly, I think you are trying to do your first flight. As the firmware has not learn what the right propulsion for your drone is yet, if the throttle is spring-loaded, you should not spring the throttle stick back to the middle after arming. You should do very small throttle stick movements (up and down), try your best to hold the throttle stick position. The objective is to hover and be ready to switch to Alt-hold flight mode to learn the drone propulsion. Make sure your 7" drone CG is within the 4 motors.
Yes i’m setting up 7" drone for testing (planning to move to a much larger drone), using Cube orange on Kore carrier board.
Drone flipped 2-3 times because of this problem, but the kore/orange doesn’t seem to have any visual defects.
I have installed new firmware and have disabled lidars/optical flow. Using only gps (here4).
when starting up I get “PreArm: Gyros incosistent” once. I haven’t flown after installing this new firmware.
I’m also interested what gyrosq, gyrosq2, gyrosq3, represent in status tab. On bench they fluctuate.
gyrosq, gyrosq2 → 0-3
gyrosq3 → 0-5 (0-6)
the tipping over problem fixed!!! by reuploading the firmware i’m not sure what parameters fixed it.
I have another problem now. I sent drone from qgc to takeoff on about 5 meters it held perfecly.
then I switched it into land mode (using transmitter - herelink controller unit) and it just fell off.
After observing the drone the power cable of one of the esc’s were cut (not entirely) and I don’t know if the drone fell off because the wire was cut or wire got cut because drone fell off by itself.
Is there any way to see that kind of information from logs. I’m uploading the logs file