I’m trying to work out the last issues on my little copter…
Often (not always) when I take off in stab, w/ no or bad GPS signal, the copter will begin tilting to the left, more and more until it’s almost unflyable. But as soon as I see the message “EKF2 IMU0 is using GPS” the copter levels itself and is fine for the rest of the flight!
How does the GPS have any affect on the level of my copter?
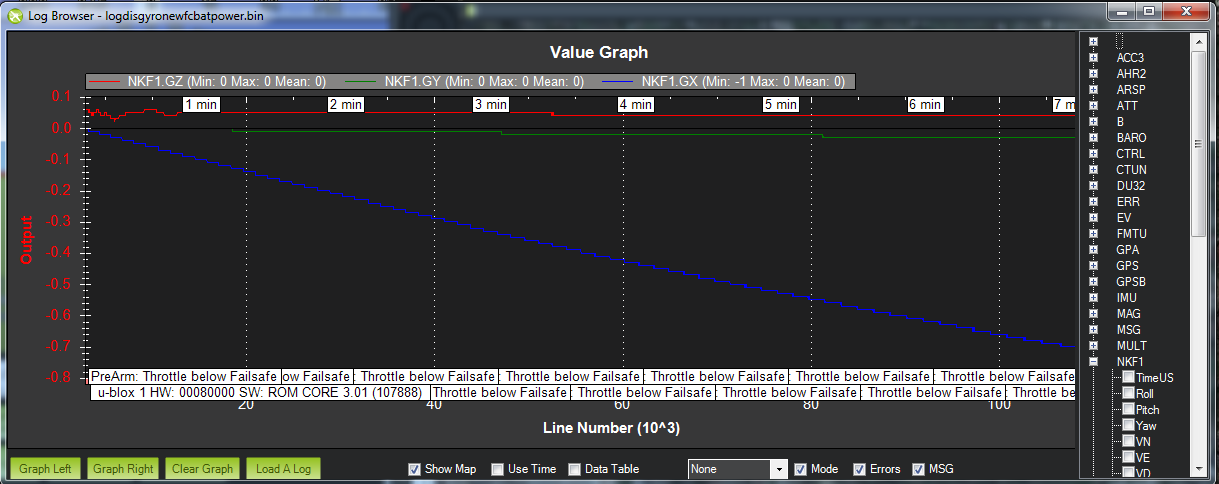
That made me look in to the EKF logs, and I noticed while sitting idle, my X gyro starts to build up a lot of bias. After 7 minutes it was at -.7. Then while flying it goes the other way and the bias goes positive and keeps increasing until I land.
I think the longer I sit powered up before I take off, the more likely I am to have the tilting issue. But, I’m not positive… the results are inconsistent.
I’ve got four of these little omnibus nano’s and they all do this. But I’m looking at a pixracer now, and it’s doing basically the same thing (Building up a constant bias while idle) but on the Y gyro… I guess it’s not too unusual.
So, question 1 is why does the GPS getting a good signal cause this issue to go away, while in a non GPS mode? I guess EKF is still looking at the GPS, but why does it stop the tilting?
And 2nd, is there anything I can adjust in the EKF settings? I know there are a few gyro noise related parameters, but I have zero experience w/ modifying the EKF settings, and don’t know what problems I could cause by changing them.
I don’t have a great log where I know the issue happens and then corrects at the moment (My flash was full today :(), but here’s a log where it does tilt. I even land once and adjust my trim to compensate.
(The end of that log has a bunch of errors, but that’s all after I brought the copter inside and was hovering in my basement to see the tilting issue)
Here’s what the idle gyro drift looks like:
Thanks for any advice.