After I replaced the motor holders, I did a quick hovering test in QSTAB mode. The vehicle is in the wind, but I have it under control.(In the previous version, I didn’t pay attention to the yaw axis controllability (it crashed immediately), so it’s hard to compare) I don’t know if the Yaw axis control has improved. The vehicle seems to be slower to respond compared to the racing drone, and also seems to behave differently than I intended with the yaw stick movement.
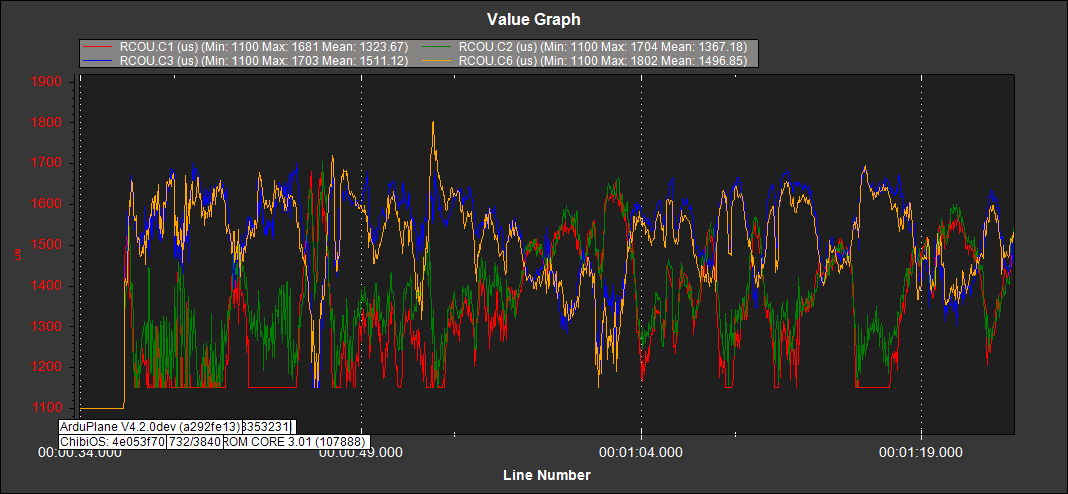
And I would like to know about the power balance of the motors, whether the current state is acceptable or not.
I think the response of the yaw axis has improved. Also, the motor output balance seemed to be stable since it was a light wind that day, is this condition appropriate? If ok, I would like to do a transition test next. Appreciate your advice.
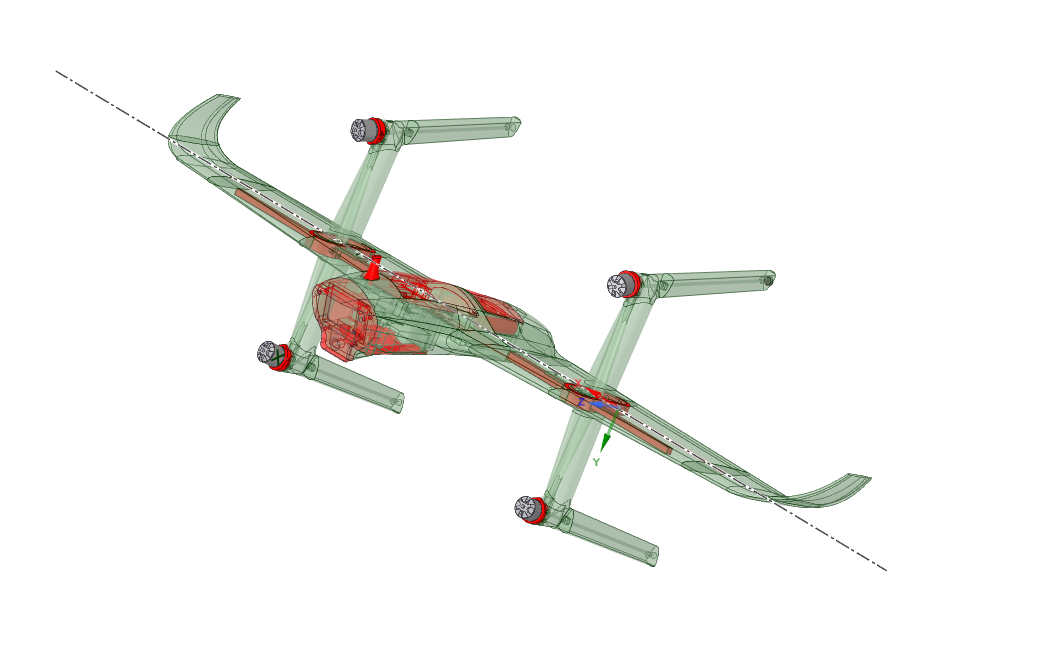
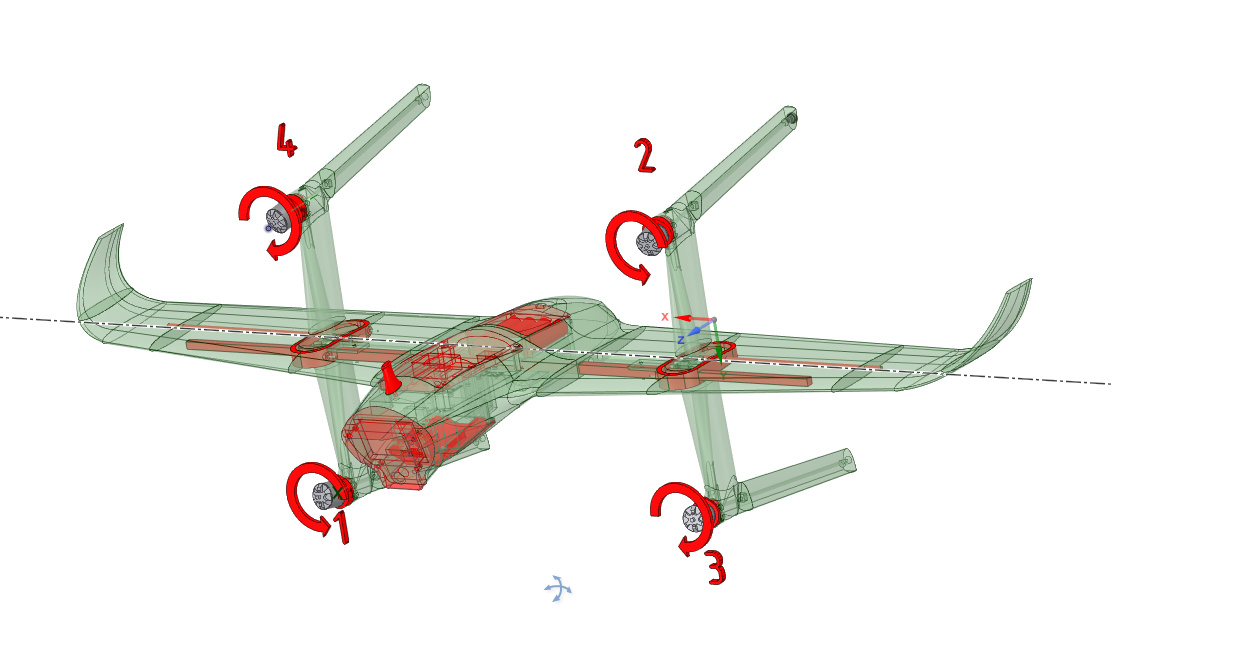
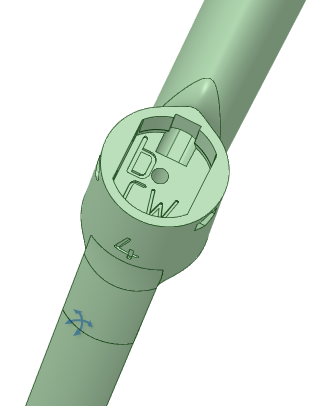
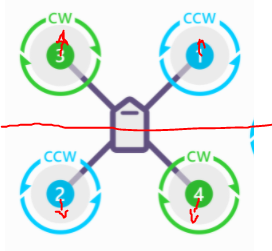
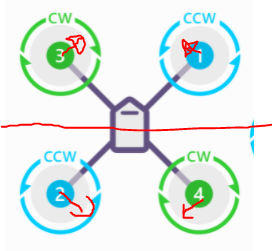
Its certainly better. But more yaw authority is always better. As Mark says you could tilt more. Currently you have the motors tilted forward and back this:
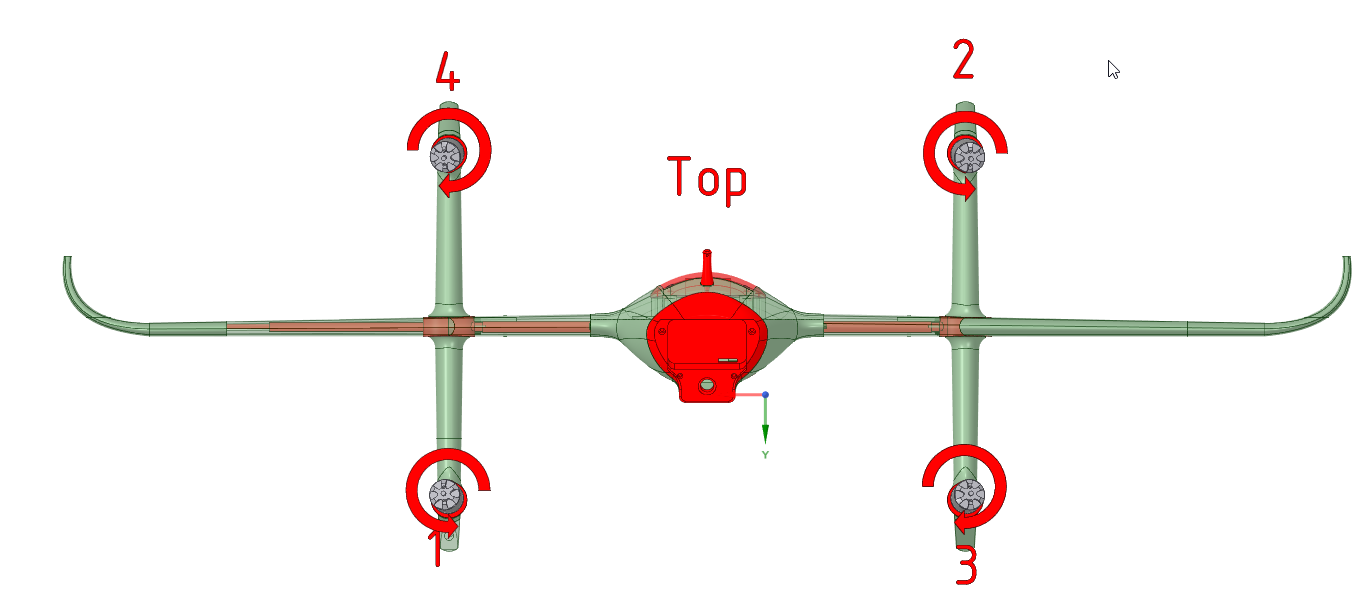
For maximum effectiveness you should tilt on a axis that runs through the CG.
You will have to excuse the bad paint skills.
That it was a square that would get you 40% more yaw sqrt(1^2 + 1^2). Since your not square you should get even more.
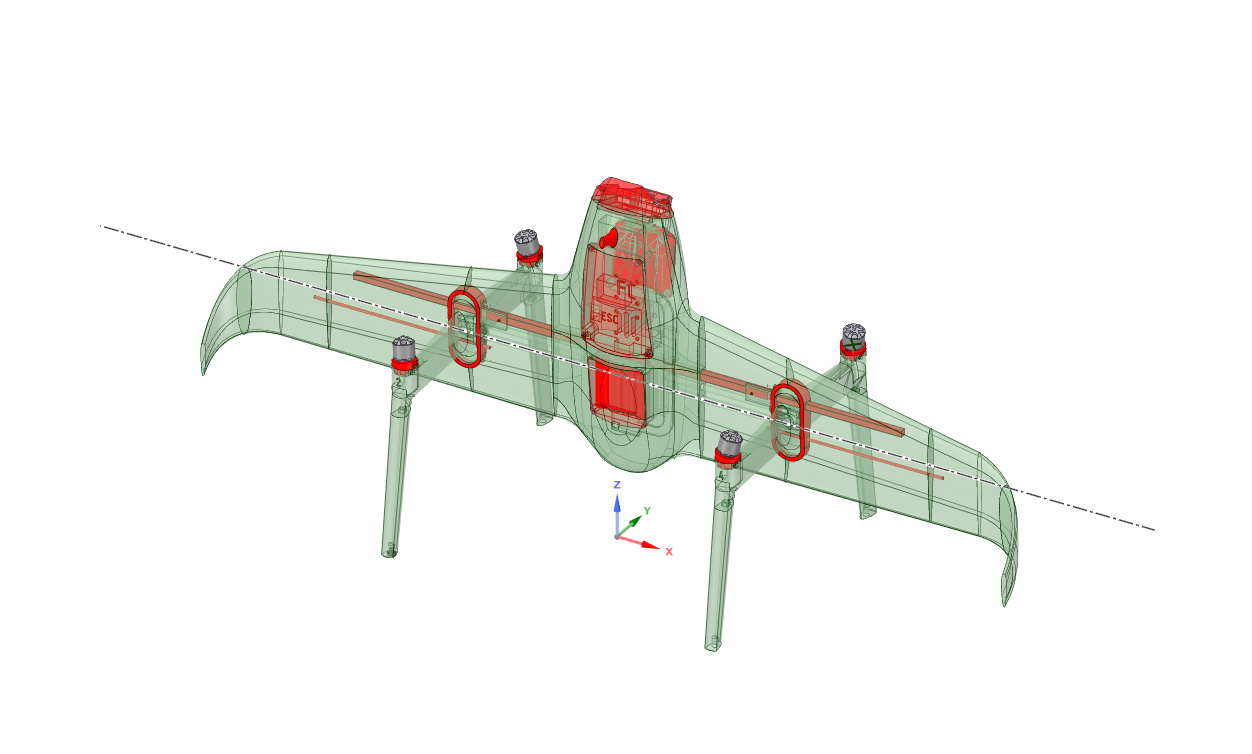
By “further outboard” I meant moving the motor mounts outward toward the wingtips, further from the CG, which will increase the moment arm for body-frame roll and yaw.
Not sure this will help anyone but if you check the motors on the HEQ Swan K1 the motors towards the wing as well as outboard. 10 degrees tilt in both directions.
Today I did a transition test. The vertical mode was more stable than before, but after the transition to FBWA the pitch up maneuver was not working (I pulled the stick as maximum) and I crashed into the ground. Is there any good way to improve this? By the way, I haven’t changed the motor mounting vector and position to the outside yet.
Thank you.
Should just be a matter of playing with the forward time constants. Because the motors are always stabilizing your always using the copter Q_A_ rate gains but in forward flight you move over to the forward flight angle gains. There actually time constants, this is just 1/P so a lower value is a higher gain. The two params are PTCH2SRV_TCONST and RLL2SRV_TCONST, I would guess you could at least half them.
Thank you.I need to make some further adjustments, but I was able to improve the aircraft somewhat by changing some parameters. I am close to getting the transitions to work.I will try the following:
Change the CG of the airframe (to improve pitch control in forward flight)
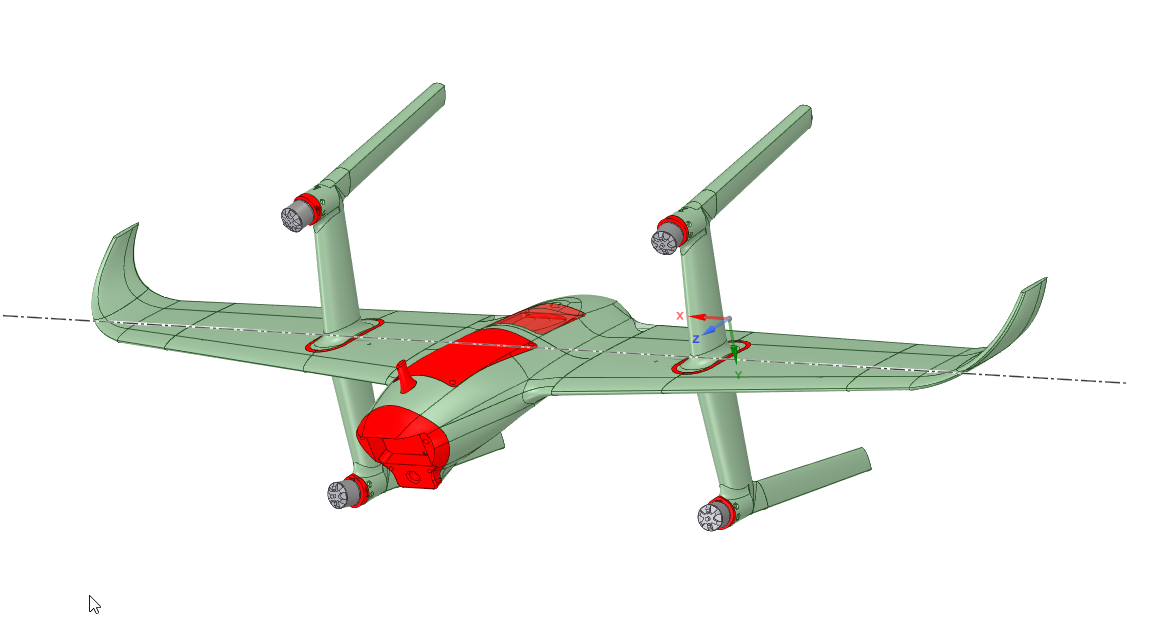
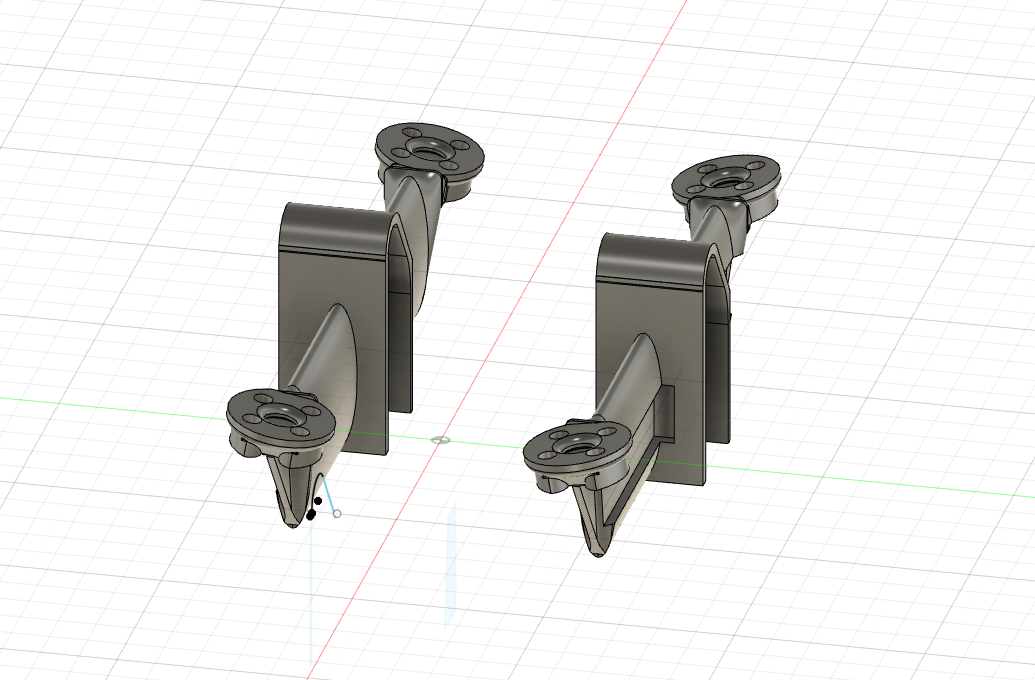
Changed the motor holder mounting angle (referring to RickyG’s layout) and moved it to the outside of the main wing.
change PTCH2SRV_TCONST and RLL2SRV_TCONST even smaller (currenty 0.25)
Any other advice would be appreciated.
Thanks in advance.
I have just successfully transitioned from QSTAB to FBWA (Before the flight, I replaced the motor holders and changed PTCH2SRV_TCONST and RLL2SRV_TCONST from 0.25 to 0.15).
On the other hand, it crashed with the following remaining problems.
During FBWA (forward flight), I have to constantly pull the stick to maintain pitch.
Otherwise, the vehicle will go towards the ground. Does the flight mode have anything to do with the tendency to have difficulty in pitching up (for example, does it respond more agilely to pitching up maneuvers in QACRO mode? Is it related to the flight mode?
The transition from FBWA to QSTAB fails. Even after switching modes, the plane crashes into the ground before reaching a vertical attitude.
Is there a problem with the transition parameter settings or my controls?
Is the CG of your aircraft behind the wing’s quarter chord point? And how much behind is it? Seems like your cg is currently in front of the quarter chord making it pitch down in FBWA.
The CG is forward of the quarter chord . The base of this plane, the FTGoblin, is much further forward than normal to facilitate stall control, as shown in the attached link. However, I‘m thinking this CG may not be for controllingin FC (force QAssist mode). I also noticed this and moved the CG back a bit (still about 20% the leading edge) on my latest flight. Do the results still indicate that the CG should be further back?
I will move the CG further back next time, let me know if you have any recommendations.