Thanks Brandon.
I see you did the modeling for the video that Andrew demos the H wing in.
Do you have the motor angles. I know that the motors are tilted in two directions…I ask because I am pondering building one at some point.
Thanks @dkemxr for the link to the video. That’s it. very cool.
I see y =10 degrees but i sure you can tilt them more. Points to the outside… I bet with your skills you could make an adjustable motor mount and tweak them.
H wing , I want to make this tool myself.I think it will have high maneuverability How do you think energy consumption, maneuverability and speed will be?
Its the main body I am having issues. Figured if I could find some starting point maybe.
There is lots I can do in 3D but organic shapes I am struggling with.
Hi all, I’m building a DIY tailsitter based on Fiitetest goblin but I got troubles that not smooth transitioning. I need help.
In that flight, the aircraft rolled naturally after transitioning from vertical mode to horizontal mode, but the response of the counter roll action to control it was poor. I felt that stick control was not effective. I then switched to QSTAB to prevent crashing to the ground, but the plane went straight to the ground (“Roll Error” occurred in that case). If this is the case, how should I change my settings?
I am also concerned that this may be due to the layout of the motors in this aircraft (see photo) and the settings.
I have pasted a link to the parameters and logs for your reference.
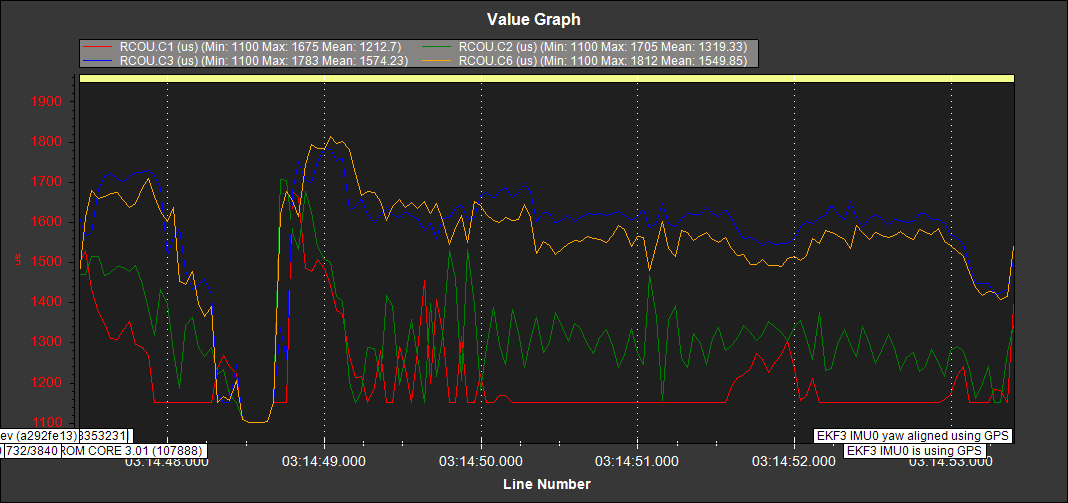
With such a big imbalance it is no wonder it was struggling in forward flight. The best way to solve is probably to setup eleveons. I see you have two output assigned to pass-through, if these are eleveons you should let AP control them.
If you have no control surfaces you will probably have to mount the motors a 5 or 10 deg angle to get back some control authority. Just like the Foxtech H wing.
All motors should be within 100 to 200 PWM in the hover, the closer the better.
Thank you for your comment, I’m building this aircraft as a no control surfaces VTOL.
I saw the picture of the H-wing. As you point out, it is viewed from the top in airplane mode, the motors are mounted a bit towards the outside. Why does it need to be this way? Also, do they need to be tilted vertically (in the side view of the vehicle) like this sketch?
The tilt is such that the thrust of the motor acts in the same direction as the torque. CW motors must spin up to move the vehicle CCW, the motor mount vectors the thrust slight to help. Ideally they would be mounted so they are angled over relative to the CG. Think of a traditional X copter with tubular arms, you would just twist the motor mount on the arms slightly.
 How do you think energy consumption, maneuverability and speed will be?
How do you think energy consumption, maneuverability and speed will be?