Just updated the permissions. You should have access now.
Can’t tell much from the video and log. The parameters I checked looked OK.
First get it behaving well in qstablilze mode before attempting any other modes.
A log from a flight in qstabilize mode will be useful for checking the PID tuning and the GPS and baro performance.
Hi @kd0aij , @hwurzburg,
Thank you for the support. It turns out vibration was the issue. I tried using gel pads but it wasn’t that effective. Then swapped the Pixhawk 2.4.8 with cube orange and that helped a lot. Vibe x was still around 50. With the 2.4.8 it was around 68. Finally, made some design changes to make the frame more rigid and brought the wings closer to the motors. That did the trick. Now vibration is below 30  . I am attaching photos of my old design and new design.
. I am attaching photos of my old design and new design.


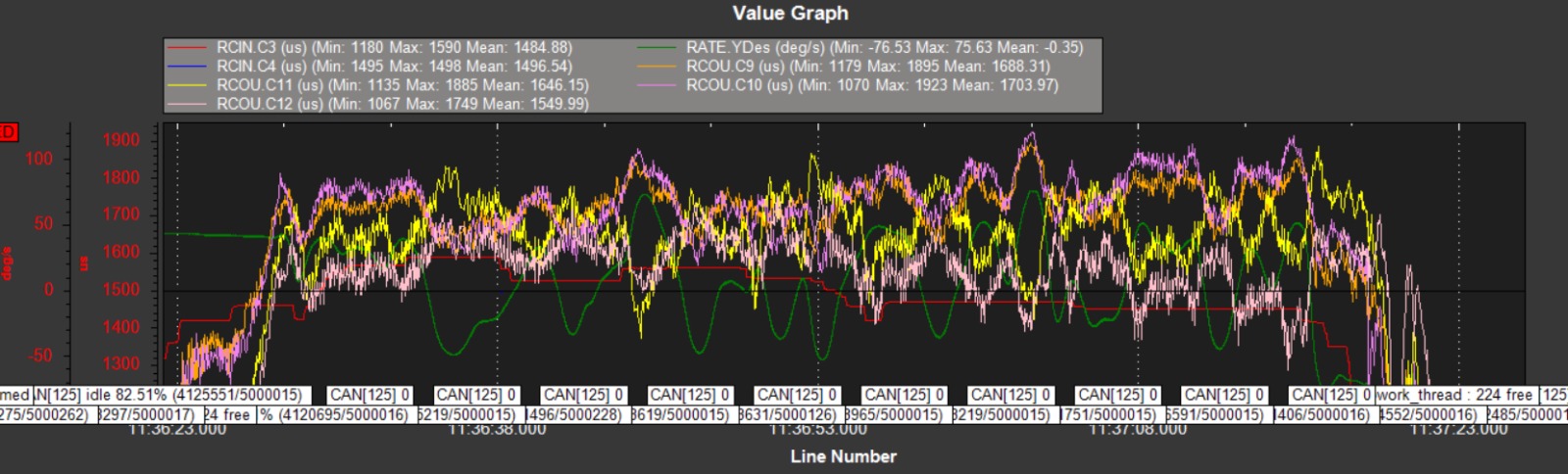
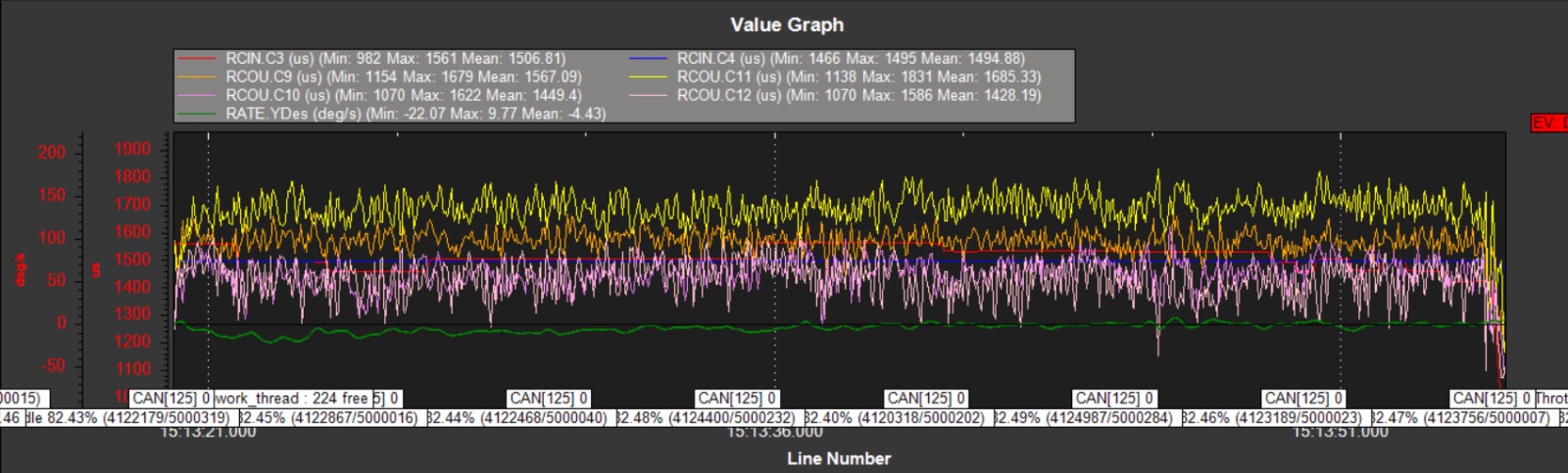
So I guess the vibration issue is resolved. I still have one more thing that is a problem. In the new design, when I am in q_loiter mode, I think the prop downwash on the wing is causing yaw instability. When I did the same test without the wings, the yaw instability went away. I am attaching screen shots of the logs for both cases. Also attaching log files. It is my theory that the prop interference with the wing is causing the yaw issue. In flight the yaw issue is not that apparent visually. It is only when I looked at the logs I saw the motors struggling to maintain yaw heading. Your input on this will be invaluable. I have tilted each motor by 10deg to improve fw roll authority. https://drive.google.com/file/d/11ns99zy8IAayEvnoa7iMT0CdPVWfVVrw/view?usp=drivesdk
https://drive.google.com/file/d/1rYDPlY_r0yHvTREEDKHP9K_JWzs978hR/view?usp=drivesdk
Regards,
Raj Patel
Hi @hwurzburg,
I have some weird issue with my tailsitter during take off in q_loiter. I have set a deadzone of 100 for throttle input. In 8/10 cases when I increase the throttle, the motor pwm ramps up at throttle pwm of 1400 and it takes off properly. But in minority of the cases, the motors don’t ramp up at 1400, but it only ramps up at around 1600 throttle pwm. When this happens the vtol rolls on one side and tries to flip. I have observed this behaviour 3-4 times and it only happens when there is a delay in motor pwm ramp up . It’s driving me crazy why the ramp up behaviour is not consistent . Also, why does it try to roll on delayed rampup ? It would be very helpful if you have some insight regarding this. I can’t find any explanation for this inconsistency. I can share the log files if they are helpful.
Thank you.
Regards,
Raj Patel
Yeah, the logs would be good.
Hi @iampete, I work with Raj and have uploaded the log file and videos for this behavior here: https://drive.google.com/drive/folders/1lgONRb9g4lFx5vd1v0apuRxUiwqDlWbx?usp=sharing
It has 3 flights in it between which the vehicle was disarmed and armed again. The take off on the first flight was normal, in the second flight it flipped in the roll direction and in the third also it tried to flip after taking off. Also, when auto analysis tool is used on this file we get the following message for the compass test:
Test: Compass = FAIL - WARN: Large compass offset params (X:-359.82, Y:82.75, Z:0.93)
WARN: Large compass offset in MAG data (X:-359.00, Y:82.00, Z:0.00)
Large change in mag_field (116.70%)
Could the problem be related to this?
Thanks for looking into this.
Compass is not happy. probably just its too close to the motor wires. Although flying that close to power lines is probably not helping. Maybe move it up and re-calibrate.
Vibes look OK, I’m not surprised its struggling in roll a little, the wings are quite long and the motors are not that far apart.
I would not pay too much attention to the auto analyzer, its quite out of date. Although it did correctly spot compass issues in this case.
1 Like
Hi @iampete thanks, we moved the compass away from the power cables and the magnetic interference has been reduced significantly.
We are seeing a strange problem where one of the motors suddenly dips after a stable flight for some time and the copter crashes. The motor outputs we are using are 9,10,11,12. In the first case it was Motor 11 that dipped, in the second case it was Motor 10 that dipped. We thought it could be the 4 in 1 esc so we replaced it with a new one. In spite of this it crashed the same way the third time with Motor 10 dipping again. All flights were done in QLOITER mode. The log files and the videos are uploaded here https://drive.google.com/drive/folders/1dAK1NNiH_I-OglTrRsI0bDZGTNvBz_uu?usp=sharing
FYI, the first 2 flights were without wings and the third flight was with wings. This does not happen on all flights, happens once in 3 flights or so. Any idea why this could be happening?
Thanks for your help!
Sanyam
Looks like a hardware issue to me, double check all the soldering and wiring. You could swap two of the motors and see if the problem moves with the motor or stays with the ESC.
Thanks @iampete. We already replaced the esc so I doubt that it would be the problem but I will swap the motors to see if the problem follows it. Also, we are using bullet connectors in between the motors and the esc, the soldering looks great but could it be because of the connectors themselves?
Hi @iampete I swapped the motors and the problem did follow them, its surprising that 2 motors went bad at the same time but they did. Replaced both the bad motors with new ones and the problem has disappeared. Thanks for your help!
1 Like
Hi @iampete, @hwurzburg we are trying to fly at 40 deg to the ground after transition to FW flight. For this I changed the AHRS_TRIM_Y to 40 deg and to compensate for that in Q_LOITER mode I changed Q_TRIM_PITCH to -40 deg. We had tested this back in June and it had worked fine but this time the pitch desired is shooting up to 32 deg even before takeoff and the copter flips on 2 legs and crashes. Could you please check why this could be happening? Also, do you know if anything has changed since June in the code regarding this? Thanks in advance!
Uploading the log files here: https://drive.google.com/drive/folders/10LrIr1PxkjdbuE-pf3AHmrvSeS3F9pU6?usp=sharing
Your going to have to give some more info on what your trying to do. The AHRS should be level for your forward flight orientation.
@iampete, we are unsure if our copter tailsitter will be able to fly level in forward flight. Therefore we would like to start testing from a higher angle to the horizon and go down, eg AHRS TRIM Y = 40 then 30 then 20 and then 10. We also suspect that we would get best efficiency at 20 deg to level so we would like to analyze data for different angles.
AHRS_TRIMy/x is limited to 10deg…you should change your AHRS orientation to custom and set it there to 40deg, I think
Hello! I been working with Andrew getting the Fox H-wing into RealFlight last week. I wish i saw this thread weeks ago. On my list to do is to try building my own frame tail sitter.
1 Like
Hey there. Sorry to step into the middle of a conversation. But I am curious, is the tail sitter code able to fly something like the Swan-K1 that say holybro is selling…
1 Like
Hi Ricky, Git has Andrews H-wing.pram and the 3D model. you should be able use it. I not sure of the Firmware to port it to AP. I going just to use a PRP and build if from scratch and use his prams that seems to fly well in RF.
1 Like
1 Like
I think for me understanding the motor assignment can be challenging as we are seeing it in a view port without a clear cad like format. Andrew makes it look like Childs play. this is what he worked out for the h-wing,
Servo1_function assigned to 36 motor 4 , servo2 to 33 motor 1 , servo3 to 34 motor 2 servo and servo4_functon 35 motor 3 . The 1st motor is the bottom-right motor when in fwd flight