Well it appears to be due to using the large frame compass cal…I managed to do a normal mag cal…got different offsets and all the second order terms cal’d…now it just does the DCM/EKF alignment stuff…after every flight and disarm, I have to lay it down for 10 seconds to allow them to re-align, then I can put it upright and arm…will have to tell Tridge about the effect of not doing a full mag cal on a tailsitter…
finished yaw tune and its locked solid… loitered outside in a light breeze well (4mph)…due for 4-5 days of wind and rain…Sunday looks to be the transition day for the BoxKite…
1 Like
Congrats on yet another new tailsitter design. Looking forward to video.
Since it’s a kite, you should probably put a tail on it 
thanks! first transition today…this thing flies remarkably well! pitch in FW needs tuning, is porpoising at mid to high throttle…
2 Likes
Looks like transitions are very good, and fun to fly!
Looks pretty good.
Q_ASSIST enabled?
no…no airspeed sensor, so would be a problem if I changed from the default of inactive to active since synth airspeed can glitch and yank me into VTOL …not sure that Q_ASSIST is a good idea on a non-vectored tailsitter in any case…since there is no hybrid transition like a regular quadplane or tilt rotor…
You should give it a shot. Q_assist works amazing with copter tail-sitters.
will have to look into it…non tailsitters ASSIST just puts you into the transition wait phase…must be something different for tailsitters…
Chatted with Peter Hall and got his dev branch that QASSIST for tailsitters to try out…
Yes, it fly very well. I believe board wings are suitable for light aircraft.
Hover is very stable too, specially for yaw. Could you share q_a_rat_yaw parameters ? also those FLT parameters.
all default except Q_A_RAT_YAW_P= 2.3156…default filters…using ArduPlane V4.1.0dev (52ca1e01) but about to try Peter’s Q_ASSIST proposal
porpoising was indeed CG…was at 20%…now at 18% and stable at all speeds with FC but manual mode still a bit squirrely…am going to built a battery mount extension and move it forward to 15% to get it more positive stable…
now that its proven to be a good flyer, I might replace the foamboard with 9mm EPP with some carbon rods for leading edges, maybe with stripped faomboard (depron only) KF2 section for a little stiffness back down the chord… but my C1 chaser conversion to TVBS might hold that up…I also want to do a clean build of the tilt-tricopter MiniTalon I have already trimmed out and tuned aiming for a more reasonable weight than 2.2Kg
Good post processing of the video. Amazing stable in Hover Mode.
And high Yaw P Value. When I was so high, I was asked by @losawing, why and tried to lower it. But with sluggish reaction.
What Q_FRAME_TYPE are you using ( 1 or 17)? Or maybe upload your Param file? (Flesh upwards in the reply menu.)
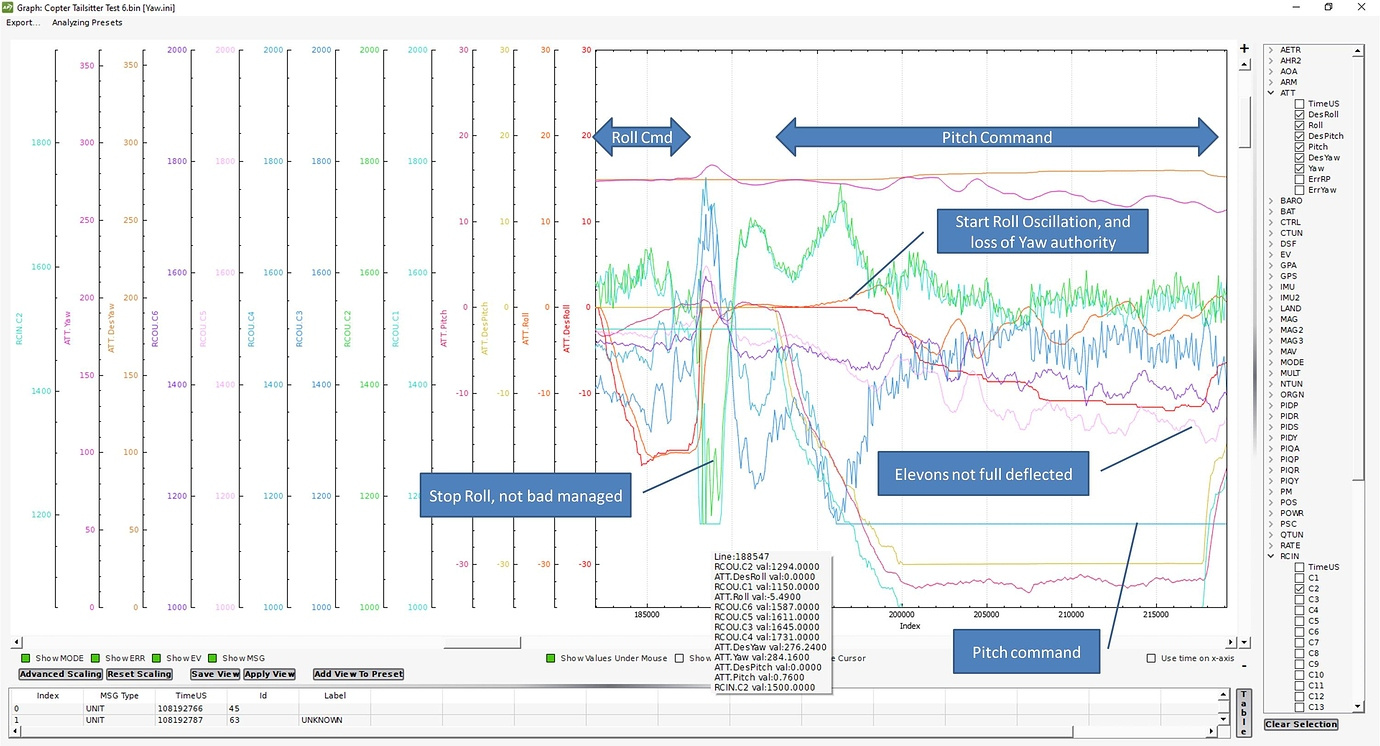
how to get these graph ?
This is not the graph from MissionPlanner, it is the ArduPlanner 2: https://ardupilot.org/planner2/
In MP two scales are possible only.
And there, I did not finde how to print or export the graph, therefore I made a Printscreen(ALT PrintScreen) and pasted it into PowerPoint.
The blue Text is inserted in PowerPoint.
From there it is possible to export it as it as .JPG after marking graph and Text.
ArduPlanner 2 in ubuntu or windows,I using the ArduPlanner 2.06 on windows ,can not find where to open .tlog file
thanks…used DashWare…I updated it and added gauges and wiki: https://github.com/Hwurzburg/ArduPilot_Dashware
class=1, type=1VTOL-Quad.param (27.0 KB)
It’s APMPlanner2 and the version I have is 2.0.26rc2.
Click on “Graphs” then “Open Log” then select a .bin or .tlog file in the popup menu.
You need .bin file at the directory which is set in MissionPlanner for the download. (MP/configur/planner/log Path.) But first you will have to download it from the FC.(MP/Flight Data/Dataflash Logs)