Start with 2 (or 3), since it is less likely to have the continuous rotation problem.
You could also try reducing Q_ANGLE_MAX to say 2000 centidegrees to reduce the chance of problems.
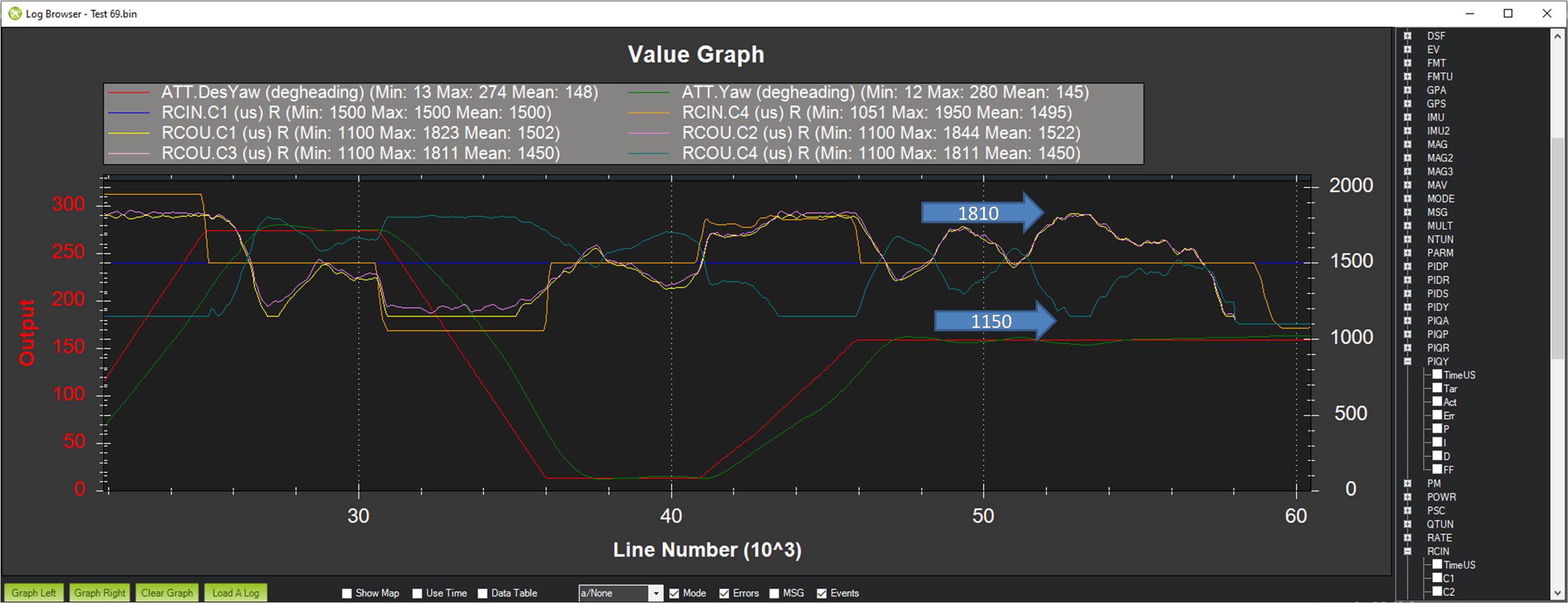
In the Rack the Torque based Yaw works similar with the elevons.
I noticed that even for small deviations nearly the full control range of the motors is needed.
For the test Pitch P,I and D were Zero because the mount for Yaw does not allow Pitch.
The elevons, aren’t used anymore.
Will this work when Pitch/Roll has to be managed too?
It should work OK when hovering. But I think you’ll be the first to try it with a real model.
I’d expect “interesting” behavior to show up only after you push the nose over more than a few degrees, or when you pick up some airspeed.
Did you test q_a_rat_yaw_flte parameter ?
I have this parameter set to 10 or 20 for my biwing, jetwing and depon. I found the yaw response is better and unstable flight in qloiter mode is mitigated. I always observed this unstable behavior as soon as auto or q_loiter is engaged.It can be seen around 2’20’’ in my video post 271.
@kd0aij , there is an angle limitation around 50° when flying q_loiter or auto. is it hard coded ?
We have actually to much “airspeed” outside by a strong gusty wind. I have to wait some days meens the meteo.
Q_A_RAT_YAW_FLTE is set to 5, Will make Rack tests with 10 and 20.
qloiter mode should respect parameters Q_ANGLE_MAX and LIM_PITCH_MIN/MAX
In auto mode, it seems that an entirely different code path is followed, it applies LIM_PITCH_MIN when landing and that defaults to -25 degrees. When doing waypoint navigation, it uses ANGLE_MAX constrained by a function of throttle. But there are no comments explaining how that is intended to work, and it’s not obvious to me what the C code is doing 
Perhaps @iampete has looked at this before…
thanks a lot for this info, I hadn’t imagine that limit_pitch_min/max apply also in q_loiter. I will set them to 9000 and let you know.
Oh wait… limit min/max are applied only for non-tailsitters
For tailsitters in VTOL mode or transition, only q_angle_max is applied.

There was a little bit of western wind this evening, maybe around 10km/h.
I switched my depron blackfly to qloiter, with this light wind it was able to keep position in a kite attitude with a lean angle around 45°. Then I pushed pitch stick full forward and did not gain one more degree, it was already the maximum. After some seconds I switched to qhover and was able to get around 75°.
That’s not a big deal but good to know.
In loiter mode, stick inputs are interpreted as velocity demands and the default max speed is 5 m/sec:
https://ardupilot.org/copter/docs/parameters.html#loit-parameters
Also, it looks like the default angle_max for loiter is 2/3 of q_angle_max.
@kd0aij
Back again, now with Q_FRAME_TYPE = 0, as recommended.
Up to Q_ANGLE_MAX = 30 not bad. Could you have a look what happens at 0:58 in the Video. Roll seem normally stable. Strange QLOITER at the end. 
Log: https://drive.google.com/open?id=1WDV4MxUaVGIxWWU75fEr-lQhNgKOub5r
Param: https://drive.google.com/open?id=1VoIi3VF3WwpiLv9TUVnGYNHVqV3bCfOH
We should stay at home, but not defined if this is also valid when alone in the country.
1 Like
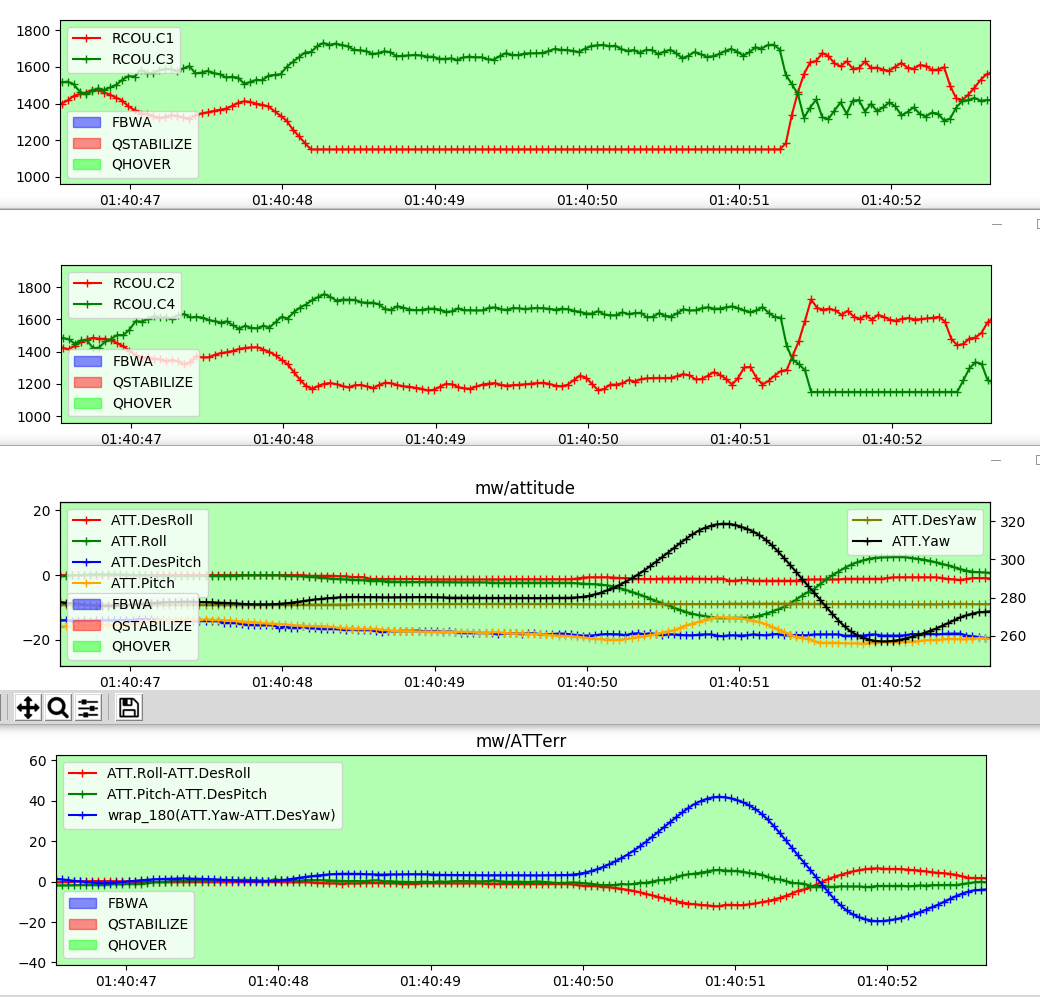
At that point, I think motors 1 and 2 are near minimum throttle, which would result in a loss of airflow over the elevons, The initial uncontrolled yaw is in the CW direction, which indicates that motor torque was insufficient to fight a tendency for CW yaw. This is an unfortunate disadvantage of using torque-based yaw on a quad plus airframe.
Is there some reason this airframe would want to roll left as you begin to pitch the nose down?
I think you will need more bodyframe roll authority from the elevons to fix this.
Thanks for analizing the Log.
I think you mean the Commanded Roll phase.
But I mean the Pitch Phase after this and the Roll-Stop Phase.
After a certain Value (?) of Pitch, the Roll control is made by the Elevons as I interpret it because the motors are working on the same RCOU. And these reacts verry weak.
In vertical Position Roll control is established by motor 1 and 2 and this is perfect, hard as set by the Params. There are also 2 different systems to control roll depending on pitch but only one set of Params.
Is there a possiblity to adjust it?

Forward transition looks good. 
Thanks, but the Earth was to close
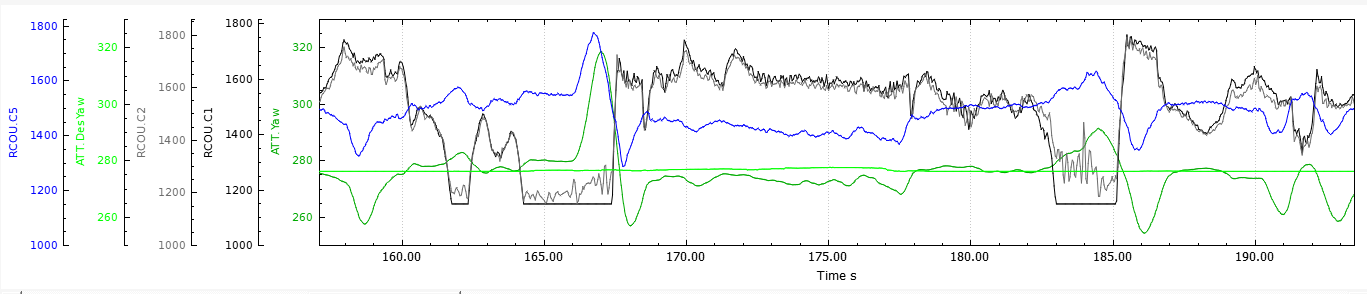
Both major yaw (bodyframe roll) deviations occur when motor 1 has been at minimum thrust for a while. This indicates that something is forcing a CW rotation, maybe turbulence?
Interesting problem, this is my second quadcopter tailsitter…the first one, (a Z-84 conversion) we discovered that often if you initialize upright, then the EKF and DCM are not aligned and will not arm, giving DCM “some” axis inconsistent x degrees pre-arm fail messages…the solution was to momentarily lay it in fixed wing position for 10 seconds or so and let them align, then bring it back upright and arm…
On my new quadcopter tailsitter, I am having a similar problem, yet different…laying it on its belly for any amount of time will not allow arming upright…It must be lower at least 45 degs toward horizontal to allow arm…the pre-arm message is “Check Mag field”, yet MAG health is 100%…I did calibrate the MAG using Tridge’s new Large Vehicle Cal, so perhaps some of second order stuff, does not get calibrated, and is causing the issue?..I can watch on the little OLED display the arming readiness report and it flops/back and forth at about 45degs tilt from “failing” to “passed”…
here is a log of some hovering in the garage for yaw tuning and you can see a disarm and re-arm attempt toward the last flights where I have to tilt it to get it to arm…
its very difficult to do a full compass cal on this, since its an ultralite foam board “box kite” test vehicle and not as robust as I would like…doing the “twist” with it might pull off the FC!
The angle disagree message is something I am used to but I never had the "check mag field " pre-arm fail
I forgot to answer your question
There was a light wind from left/back of me. And to hold the wing near the camera I had to roll/pitch to left.
The same to me. I had to power cycle, press the safety button an arme again.