That list was a “diff”, so missing entries should be the same in both files.
I believe a FLTx value of zero means no filter, and is the default for FLTE. So that should be OK.
The yaw controller will “give up” and let desYaw track actual yaw if the control error becomes too large.
This is usually caused by something like weather-vaning which overpowers the elevons.
Thanks for the explication. This time I did not proceed in the Rack as usual.
Normally, I started with all params (P,I,D) Roll, Pitch and Yaw at Zero. Then increased P for Pitch until shaking, then D and later P again. Finally also I. The support of the Wing corresponded with the appropriate axis.
With Roll and Yaw at zero was no influence to fear.
After that the same procedure for Roll and then Yaw.
The wing rotated and so the control was difficult to me on distance and top or bottom are both black
I’d like to know if you can edit it in 3DSMax and if so, your opinion on how this approach compares to doing everything in Max.
@losawing What is your opinion on 3D printing fuselages and wings? Do you think the result would have better or worse strength to weight ratio than traditional techniques?
For this project, 3D printing seems to me the right technique because you will get at the same time a waterproof surface. This is a definitive advantage despite PLA can not compare to wood or composite materials for strength/weight ratio.
From my side I plane to make a balsa fuselage but I will have to cover it with glass epoxy so overall I think the weight will be comparable to the 3D printed one. I plan to make wings only with foam core and carbon reinforcement covered with a shrinkable film. It will be light but I am not very confident to get them waterproof and not bent.
I never worried about my EPP (closed-cell) foam planes getting wet (except for the electronics), and the floats were made of EPP with a plastic skin over the bottom. But I guess open-cell foams will absorb water.
3D printing might have an additional advantage if the design is printed more than once, or if it’s easier to iterate the design during the prototyping phase.
This is what I have in stock.
Carbon fiber is only intended to make wing spars.
light 25g/m² glass fiber cloth to cover the fuselage. I never heard of covering a balsa structure with carbon fiber cloth. Maybe too rigid to follow a complex outline. And the weight will be much more the resin and the paint.
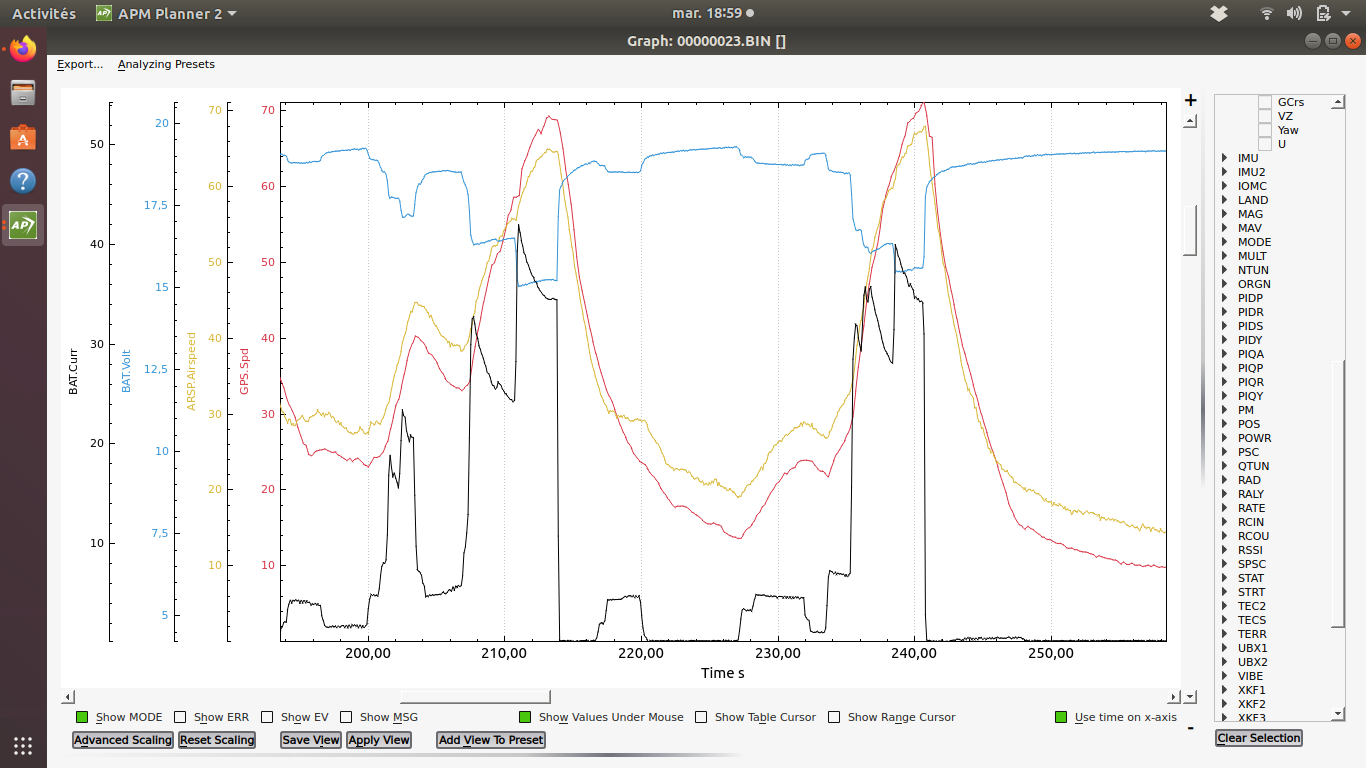
Last WE, I have upgraded my jet wing to 5s battery and made some more tuning. the new gps speed record is 71.1m/s. There were about 5m/s of wind. Voltage sag is around 4V at 80A (only 2 motors are connected to power module) so this is around 300W lost in the battery. Motors are 2600KV and propellers Emax 7.5*5 (7.5 pitch is false, they are more about 5 inches pitch). With a better battery and pylon racing propeller I think 300km/h is not impossible. Would be nice for a VTOL aircraft …
Hey guys!
Has anyone tried using dual gps on tail sitter? Having one facing up during hover and one facing up during fixed wing flight? Using “USE BEST” option in Ardupilot, will it switch between GPS?
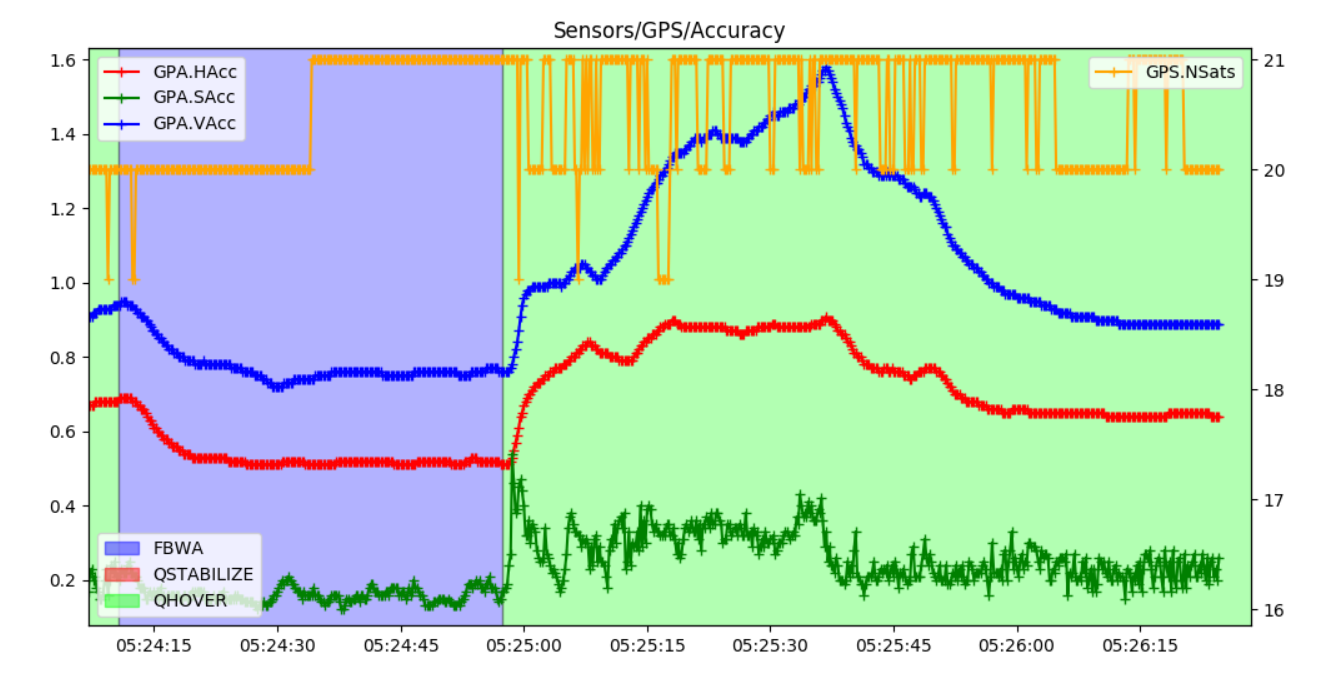
I’ve never tried using dual GPS, but I’ve never noticed any problems with reception when hovering (except under trees). Do you have any logs which show a loss in GPS quality while hovering?
My HDOP value is actually higher when its sitting on the tail. And in one of the flight where the aircraft was doing QRTL, leaning towards the top surface, i got lot of bad GPS health messages.
The trouble with use best option is when it switches if there is a discrepancy it can upset the EKF. There is a open issue to fix that.
I think mounting you GPS 45deg would probably be a OK compromise. Or even slightly biased towards copter mode after all you more likely to want to be doing accurate stuff like taking off and landing in copter mode, its not so important in plane modes.
Hey! @iampete@kd0aij
I noticed Wingtra has a GPS facing straight up during hover mode. That’s what made me wonder whether they used dual gps facing both the directions of flight.
And also I have plans to test Moving baseline feature with Z9P on tail-sitters. Need suggestions from you guys whether it’s a good idea or i should skip it.