Again i think the EKF gets upset if you have it setup and loose it, on a tailsitter i guess you have a higher chance of loosing lock. Again i suspect some work will be done to fix this as capable gps’s become more common.
1 Like
A great high Speed, but what about slow down with Q_Assist as showed with the mini-BlackLetpi?
And how does it react when in slow FBW mode switched to Q_Hover? E.g. for a landing approch procedure to avoid a transition with jump upwards.
not yet tested, I hope to make the test soon.
My jet wing is not functional for the moment. I am making static propeller tests with more diameter and more pitch and have burned the bottom motor and yesterday the left wing one.
Thanks anyhow, good luck. The mots seems to work on their limit. 
@lorbass I’ve been printing existing designs from 3Dlabprint and Eclipson (e.g. https://www.eclipson-airplanes.com/model-z) to gain experience with this kind of design. Am having better luck with PETG using the Eclipson STLs.
Also found this yesterday: https://cults3d.com/en/3d-model/various/el-39-semi-scale-rc-jet-for-120-mm-edf
That’s a pretty impressive size, and I had no idea you could print high-power turbine blades in PLA.
He mentions that he uses 3DS Max, too.
I see, you found a new challenge. Really amazing what they made. I always thought the turbine blades should be polished and the grooves of the printing surface would be bad for a good efficiency.
Did you buy the data of the eclipson? A good price for all these infos.
PLA is not good if it becomes warm. A battery connector housing or the holder of the Airunit Google RE has deformed. The Airunit became warm of 70°C (159F)
I’m still wating for the right weather to continue the tests with my copter Tailsitter. We have actually verry different weather situations. No wind but frosty, warm(15°) but rainy, stormy with wind gusts up to 160 kmh. Therefore I improved my 3D Max knowledge at the Youtube Academy. There are a lot of Tutorials.
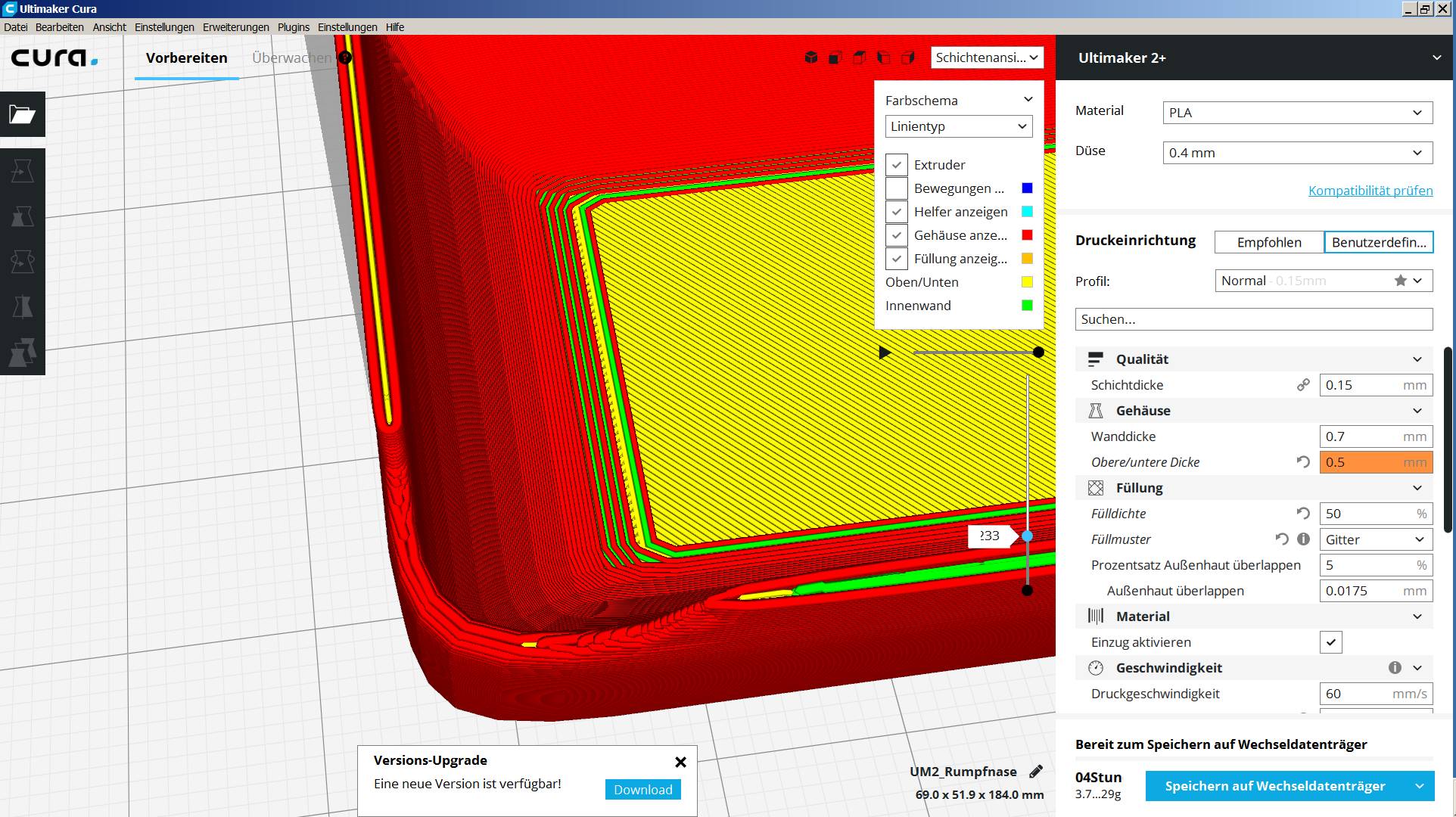
And with these I learned new procedures and so I made a Fuselage Nose for the Caipirinha.
Thickness 1 mm, Weight 28 gr.

I don’t think I’ll be messing with turbines of any kind soon. I prefer big, slow propellers.
The surface finish on that print is very nice; what is the layer thickness?
I did buy the Eclipson Model Z files, and it’s printing nicely for me in PETG.
And PETG is not supposed to soften below 85C, so it should stand heat better than PLA.
Most of the parts are printed for the Z now: https://photos.app.goo.gl/vGrdAHzPF4uXJXPz7
The PETG is transparent blue, canopy is clear T-glase and the Spitfire is red PLA,
Best of luck with the weather there. Snow, cold and windy here today.
The layer thickkness was 0.15 mm, wall thickness 0.7 with nozzle 0.4 mm.
What do you mean about LW-PLA as mentioned for the Z? https://colorfabb.com/files/TDS_E_ColorFabb_LW-PLA.pdf
By the way: I use this tape on the heat plate. For month the same tape. The recommended glue stick is a mess, and several small tape not flat. https://www.banggood.com/200mm-x-100ft-High-Temperature-Heat-Resistant-Kapton-Polyimide-Tape-p-1215706.html?rmmds=search&cur_warehouse=CN
When the plate is hot, it holds terible, but when cooled down until the vent stops, easy to remove the printed part.
I’d never heard of lightweight PLA before, but I think I’ll try it. Just saw this post on RCG:
https://www.rcgroups.com/forums/showpost.php?p=43778161&postcount=205
If you can print these structures at half the weight, they look even more practical for planes.
I’ve always used 3M blue painter’s tape on a heated glass bed, with a coat of hairspray between prints. PLA sticks well, but detaches easily when still hot. PETG sticks hard enough that the tape is usually damaged on removal, hot or cold.
But hairspray on glass seems to work for PLA too. Agreed that glue stick on glass is a PITA
Test 2 with my Caipirinha Copter Tailsitter.
Still frustrating behavior, worst vehicel since many year.
Q_A_RAT_YAW_P reduced from 0.5 to 0.18 (default)
- Nearly not to control in Yaw.
- Strong Yaw oscillation but when pitch or roll input only.
Difficult to get back and down even with less Wind (2 kph)
Video: https://youtu.be/H6WHaOKXFuU
Log: https://drive.google.com/open?id=1X1AgaWnjmwAZk0qLsVOKirj3MMSOJRHg
Params: https://drive.google.com/open?id=1N1Y2Kdfqru9ULscpsPK0f1yudL2fhdCI
I’ve checked many times the setup (servos, function, Prop direction of rotation)
In the rack Yaw is also instable or does not react on control inputs.
But Roll and Pitch react as usual in the rack. Hard, fast, no overshoot, stable.
Can you have a look at it, please?
I think you want to turn down Q_A_ANG_YAW_P from 4.5 to like 2. Then probability turn up the RAT_YAW gains a bit. Have you tried a yaw Qautotune? you would probably need to turn the aggressiveness down to get it to complete.
I see that Q_A_ACCEL_Y_MAX is only 27000
Try increasing that to 110000
It should speed up the yaw response.
I had the same issue with Octa tail-sitter. I increased Q_A_ACCEL_Y_MAX and Q_RAT_YAW_P and it flies good now.
Here’s a video of first prototype!
3 Likes
@lorbass
1- the kind of yaw oscillations you get are definitively not because of high P or D gains. This is very likely an aerodynamic effect that the controller struggle to cope with. Imagine what look like airflow on your wing at such angle… nothing nice and laminar just turbulence instead.
2- there are a lot of very bad parameters in your list
you need to increase q_a_rat_yaw_p (as much as possible) but q_autotune did not gave me good results for yaw. Because it ends with too low value specially with D. Yaw_d must not be 0 and yaw_I between 0.5 and 1 increase the wind resistance. Some FF (0.1 to 0.2) may help too. More important is q_a_rat_yaw_flte, you have a low value and I reported post 53 that when flte is low but not 0 it gives a sluggish yaw exactly the way your taisitter behave.
Keep courage, this is not RTF but that would not be interesting.
thanks for sharing and congratulations because your aircraft fly just perfect.
Just 2 questions
Do you have yaw control also with differential torque?
How do you manage to make smooth transition without altitude change
Tanks to all for analizing.
Do you mean I should turn down?
No, already difficult enoughe to get it back. I think there was no time to let it to tune.
@kd0aij, Was always at 2700, will try higher. But in the Wiki the Range goes up to 72 000. ?
@Mallikarjun_SE, what is your Q_A_ACCEL_Y_MAX now?
A correction of the direction needs the full deflection of the stick and then it turns slowly.
In your comment I see, it should be solved by tuning and I will work on it.
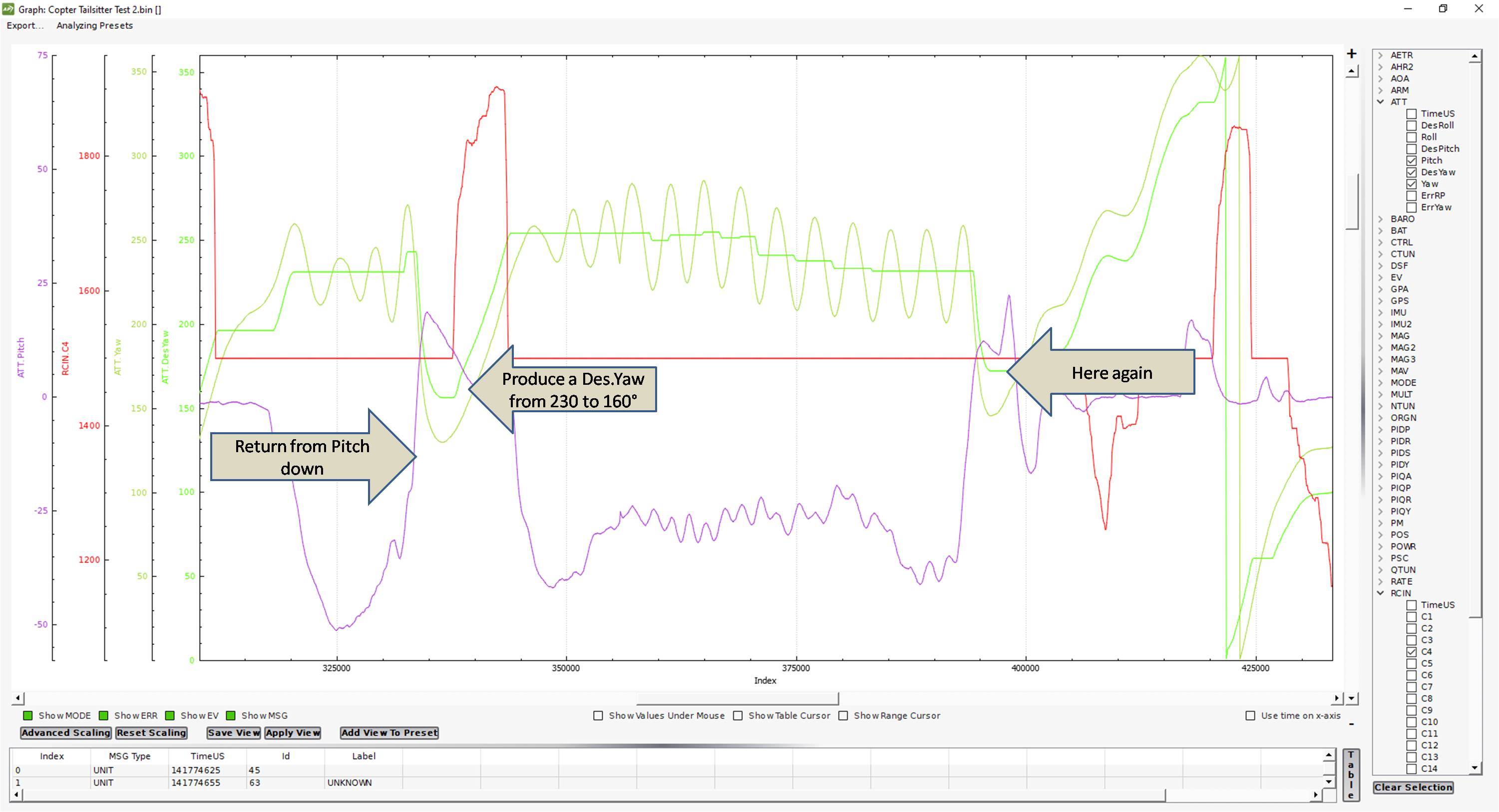
But there is another effect which makes me doubtful.
In the log the Des.Yaw changes without command. Sometimes when the Pitch stick is released. I think then the controller will have to follow. Sometimes it changes during forward flight.
I will check the maximum for P,D,I (as used in the early days) in the rack by setting Roll and Pitch Params to Zero to avoid influences. Because of the good results in SITL I’ve been too lazy so far.
Will report the results.
Was helpful and “nescessary”, thank you.
@lorbass Try changing Q_TAILSIT_INPUT from 0 to 2 for MC style bodyframe roll. That mode treats yaw errors differently and should eliminate any drift in the desYaw setpoint.
Yes. Yaw is differential torque. You can listen to motors screaming during yaw.
Re Smooth transition, I just had to figure out right speed to transition back. I have had change in altitude during transition from high forward speeds.
I was wondering whether we can add some parameter to slow down aircraft to required airspeed before doing transition back. Or make q_assist to gradually decrease airspeed before completing transition back to hover(exactly like how it assists during transition, but to transition back).
@iampete @kd0aij what do you guys think?