@lorbass Thanks for pointing that out; I wonder whether autotune changed the q_wp parameters?
The throttle expo should be 0.2, not 20.0; probably a typo. I’ve updated the SITL parameters again.
Which monitor do you mean? Good idea to think about the HW.
My FC is also a Pixracer R14 .
Tomorow I will test this with a new Holybro Pixhaw 4 mini.
@lorbass I just flashed master to my Dart, which is also a Pixracer, and the motors started up as usual.
Here’s a link to the parameters for it:
It has frame_type=16 and the ESC is BlHeli32 with dshot150 (q_m_pwm_type=4)
Q_FRAME_CLASS 1.000000
Q_FRAME_TYPE 16.000000
Q_M_PWM_MAX 2000.0000
Q_M_PWM_MIN 1000.0000
Q_M_PWM_TYPE 4.0000
I loaded plane 4.0.3 in my jetwing (pixhawk fmuv3) : motors does not arm with frame_type=16 but arm with frame_type=0
Then I loaded binaries from post 99 and I can arm motors with 0 and 16
Note : you need to reboot after the frame_type change.
@losawing What is Q_M_PWM_TYPE for your jetwing?
q_m_pwm_type = 0
BLheli 32 esc
With my Params the same behavior with Holybro Pixhawk 4 mini as with Pixracer.
With Master or V4.1.0dev same behavior.
Pixracer with Params dart_frame16_master from @kd0aij it works.
But did you recognize AHRS_EKF_TYPE is 3 but EK2 is enabled too.
Tomorow will start to adapt Param by Param to my Wiring in order to see where it goes wrong.
@lorbass This is the first test print with skin thickness of 0.6mm in PETG. Fairly tough and watertight, this is 50x50x250mm and weighs 22g. If I can get the thickness down to 0.4mm, the weight should decrease. I’ll see if I can generate an even thinner mesh for the surface.
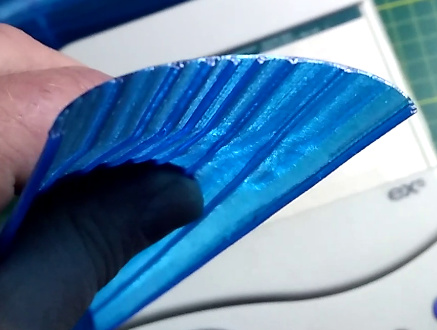
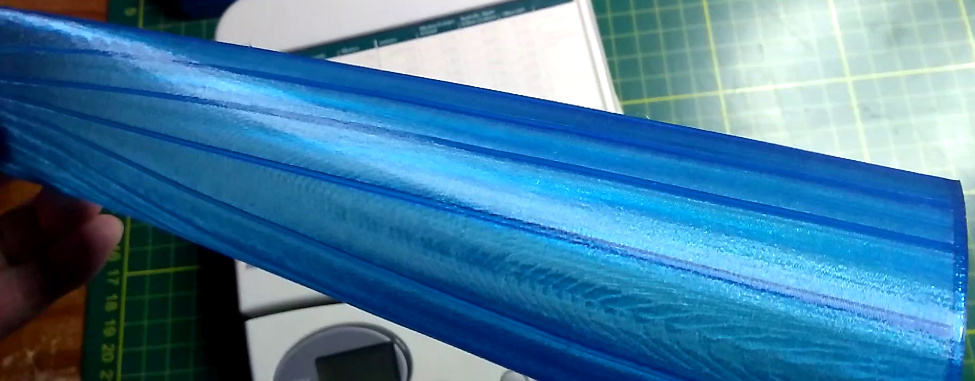
It looks good. With my Printer Ultimaker I got a sample with 0.4 mm thickness. But I do not know if printed with 0.25 or 0.4 mm nozzle.
Edit: Here the pics.


I try to show the situation about the activation of the Outputs.

In general: In Master works Q_FRAME_TYPE = 0 only and in FW Post99 Q_FRAME_TYPE = 0 and 16 .
Something “instable” in Stable.
maybe a newbie question : is master and plane 4.0.3 the same ?
Yes. sorry about mismatch.
Tried the whole afternoon to get working Binaries Post99 and “dart_frame_master” Params from Mark. The outputs are now on with Q_FRAME_TYPE = 16 but I can’t arm with the Throttle Stick anymore.
Even with the full calibration turn around (Accel, Mag, Radio) and no error messages.
Back to 4.0.3 it’s possible but no outputs with 16.
May be it’s a warning to stop the Project and to ground the Wing ![]()
Edit: Binaries can’t arm even with Reset the Params to default.
jetwing27janpost99.param (23.9 KB)
This is the parameter list that allowed me to arm my jetwing with post 99 binaries.
Compare it to your parameter list to look for differences. May I get your parameters to look at.
There might be some confusion too: when you say can’t arm in previous post, was it pixhawk, pixhawk armed but no signal to servo1-4 or ESC that do not arm ?
Plane 4.0.3 and master aren’t quite the same.
I can confirm that the motor outputs don’t work (no signal) with 4.0.3 but do with latest master and the build from post99 (pr-gsc-base 4119ebff).
With both master and pr-gsc-base, the motor PWM outputs start immediately after boot and before arming.
These are the BRD parameters I have:
BRD_BOOT_DELAY 0.000000
BRD_OPTIONS 1.000000
BRD_PWM_COUNT 6.000000
BRD_RTC_TYPES 1.000000
BRD_RTC_TZ_MIN 0.000000
BRD_SAFETYENABLE 0.000000
BRD_SAFETYOPTION 3.000000
BRD_SAFETY_MASK 0.000000
BRD_SD_SLOWDOWN 0.000000
BRD_SER1_RTSCTS 2.000000
BRD_SER2_RTSCTS 2.000000
BRD_SERIAL_NUM 0.000000
BRD_TYPE 4.000000
BRD_VBUS_MIN 4.300000
Hey @iampete
Q-Assist is just amazing. Got to test this on an aircraft and works really well.
Great! What type of aircraft, and can you post a log?
I tried Binaries of Post99 as you recommended with the Params of Mark (Dart)
With this setup, the outputs are always on the minimum (1000) due to BRD_SAFETYENABLE 0.000000.
with Q_FRAME_TYPE=16.
And in the MP Hud I saw “disarmed”. I mooved Param by Param to my wiring setup and checked each step after rebooting if the outs where still on. Nearly at the end, I checked also with the Radio. And then discovered that I can’t arm with the throttle stick. Therefore I went back to the beginning and even there it was not possible to arm. I will compare with your jetwing Params and here my params I nearly modified to my setup.
Dart to OK mit Devs.param (20.8 KB)
Thanks for helping.
I thought when loading in the MP, there are the masters indicated.(Rover, Plane, Copters…)
May be they would start, I did not connect the battery. But in the hud is always “disarmed” to see with Binaries of Post99 and no reaction with the Throttel stick as usual and with 4.0.3.
I have the same BRD Params, except now BRD_SAFETYENABLE,1
In my test, the only power source was USB.
It is strange that 4.0.3 behaves differently to pr-gsc-base and master. I’ll look for the cause.