User_4
January 25, 2020, 11:37pm
1
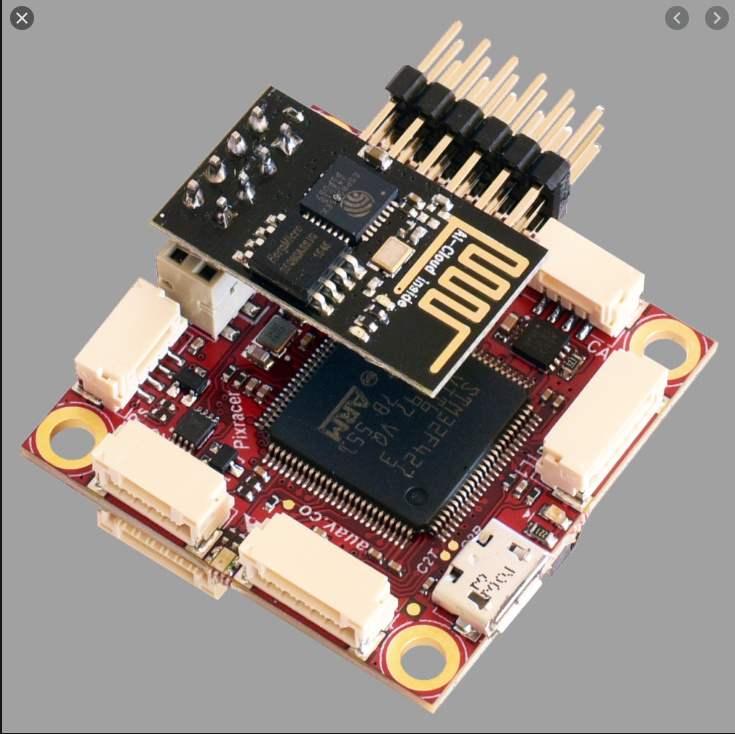
I am using an mrobotics pixracer R14: https://store.mrobotics.io/mRo-PixRacer-R14-Official-p/auav-pxrcr-r14-mr.htm
On Arduplane 3.9 in Mission Planner, I can see that the channel monitor is behaving as expected.
Is Arduplane 4.0 incompatible with the pixracer R14?
Dave84
January 26, 2020, 6:17am
2
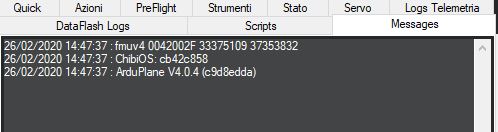
Good day, didi you flash the firmware fmv4 or pixracer version? Just consider you have also new firmware arduplane 4.0.2
1 Like
User_4
January 27, 2020, 5:28pm
3
I am not sure what you are referring to by “fmv4”, and “pixracer version”. Do you mean arduplane and px4 firmware?
I believe I was using Arduplane 4.0.1. Do you think this issue has been resolved in 4.0.2/4.0.3?
Dave84
January 27, 2020, 7:57pm
4
me i’ve flashed arduplane on my pixracer without issues… i will attach you the links…https://firmware.ardupilot.org/Plane/stable-4.0.3/fmuv4/ https://firmware.ardupilot.org/Plane/stable-4.0.3/Pixracer/
In every release there are always a bug fix…
i will also attach you this link so you can check
Release 4.0.3, 21st January 2020
--------------------------------
This is a minor release with a few bug fixes and enhancements. The
changes since beta1 are:
- fixed 3 missing semaphore waits
- fixed checking for bouncebuffer allocation on microSD card IO
- fixed incorrect param count
- prevent failsafe action from overriding a VTOL land
- fixed compass calibration failures with auto-rotation detection
- fixed errors on STM32H7 I2C (affects CubeOrange and Durandal)
- fixed a race condition in FrSky passthrough telemetry
- fixed DSM/Spektrum parsing for 22ms protocols
- added fixed yaw compass calibration method
- re-generated magnetic field tables
- ensure SERIAL0_PROTOCOL is mavlink on boot
The most important fix is for FrSky pass-through telemetry. Pass
through telemetry support had a race condition which could lead to the
show original
adcam
January 30, 2020, 7:14pm
5
Hi everybody
I jave a pixracer R15 from mrobotics
Thanks
Dave84
January 31, 2020, 9:18am
6
Good day… i don’t get what do you mean do something special for, 4.0.x
patrick
February 25, 2020, 10:11pm
7
How did you do the update? About the Mission planner software?
Dave84
February 26, 2020, 1:02am
8
with MP you can update your firmware
User_4
February 26, 2020, 1:32am
9
For the R14 I could not get 4.0+ to work; I reverted to 3.9.2 and everything functioned as expected.
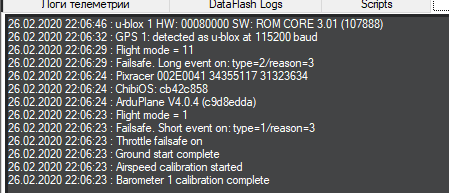
i have chinesee copy of R14. Ardupilot 4.0.4 work fine in my wing dart250g
User_4
February 26, 2020, 2:10am
11
Oh can you send me a link to the Chinese clone you are using? I would love to take a look.
Dave84
February 26, 2020, 4:17am
12
I will do some test on my mro r15…i will let you know asap
i can’t find on market it now. I bought it 3 years ago.
Red PCB, pink shell. Marking R14 on pcb
1 Like
Dave84
February 26, 2020, 1:10pm
14
Good da, i think you have bought the pixracer v1.0.
my pixracer update BL automatically. I not update it manually.
Dave84
February 26, 2020, 4:58pm
16
are you able fly with this version?
yes it fly. baro, compasses, serial ports, everything work.