‘dihedral’ that is the motor pointing towards the centre of the aircraft does not help, just reduced the moment arm of the motors.
Pointing the motors at 90 deg to the cg can help with yaw authority, the motor must point such that the torque and vectored thrust act in the same direction.
Actually, tilting the motors “inward” for the standard quad-x layout, greatly improves yaw authority for the BiWing model in RF8. I tried 5 degrees of downthrust on the top wing and 5 degrees of upthrust on the bottom wing. This adds a yaw moment (body-frame roll) for each motor which is in the same direction as motor torque.
It looks like the Quantix has the motors tilted outward, and in that case you would need a quad-H frame for the motor torques to be in the same direction as the tilt-induced yaw (roll).
Congratulations on winning the battle with Windows and Realflight
The transitions looked good to me; was this on master?
The YouTube video quality shows as 1080p, which is fine, but the 2nd and 3rd links are the same.
Skydroid looks interesting.
Thanks your help
In case you want to test another Model, I would like to help too with drawing it in 3DS Max.
Sorry, copy paste error, already edited.
The firmware for this is made by a “Master” but not shure what I use.
In Ubuntu, home/lorbass/ardupilot/ArduPlane I found a File “version.h” with this content: #pragma once
#ifndef FORCE_VERSION_H_INCLUDE #error version.h should never be included directly. You probably want to include AP_Common/AP_FWVersion.h #endif
#include “ap_version.h”
#define THISFIRMWARE “ArduPlane V4.1.0dev”
// the following line is parsed by the autotest scripts #define FIRMWARE_VERSION 4,1,0,FIRMWARE_VERSION_TYPE_DEV
When you run sim_vehicle.py to start SITL, it builds the firmware you have currently checked out. There should be lines like this in the console output:
SIM_VEHICLE: Building
SIM_VEHICLE: "/home/markw/linux_git/kd0aij/ardupilot/modules/waf/waf-light" "build" "--target" "bin/arduplane" "-j" "4"
To see what branch is currently checked out, type “git status” in your ardupilot/ArduPlane directory:
~/linux_git/kd0aij/ardupilot/ArduPlane$ git status
On branch master
Your branch is up to date with 'kd0aij/master'.
nothing to commit, working tree clean
To update to the latest version of master:
~/linux_git/kd0aij/ardupilot/ArduPlane$ git pull
Already up to date.
git submodule update --recursive
You probably want to do a “git pull” periodically since master changes often. There will be no output from the submodule update command unless a submodule has been changed.
If you wanted to do release testing for plane 4.0, you could check that out instead:
“git checkout ap/plane4.0”
Thanks for the offer to do graphics for new models; it would be fun to do one similar to the BlackFly or @losawing 's latest model. You could even make it amphibious
There’s also a startup called F-Drones: https://www.f-drones.com/our-team-copy which is planning a heavy-lift version of a bi-wing tailsitter. (CGI graphics about 30 seconds into the video)
On branch pr12869
Untracked files:
(use “git add …” to incklude in what will be committed)
BiWing/
CaipiQuad/
Caipirinha/
nothing added to commit but untracked files present (use “git add” to track)
was the answer.
After “git pull” a lot of lines but after “git status” the same message as above (On branch pr12869)
I think I will try first the BlackLetpi, if @losawing can give me the measures. Threre will be a new chalenges with the mots an wings 45° to the fuselage. You remember, these had to be drawn horizontally whyle the wing is vertically.
What do you mean with “amphibious”? No holes underneathe.
I forgot that you were using a PR branch.
Since that PR has been merged into master, you can now do
git checkout master
to use the latest code. The “untracked files” are the files and folders that you have created for running SITL. It’s a reminder that they aren’t stored in the git repo, so you should back them up separately, if necessary. Since those files are mainly just parameters and logs, I don’t back them up myself, just delete old logs so they don’t take up too much disk space.
With the right kind of fuselage, it would be possible to do water T&Ls with a tailsitter like the “BlackLetpi”. The BlackFly can float, but there’s not much to see in their videos: https://youtu.be/l53JKod9yfA?t=23
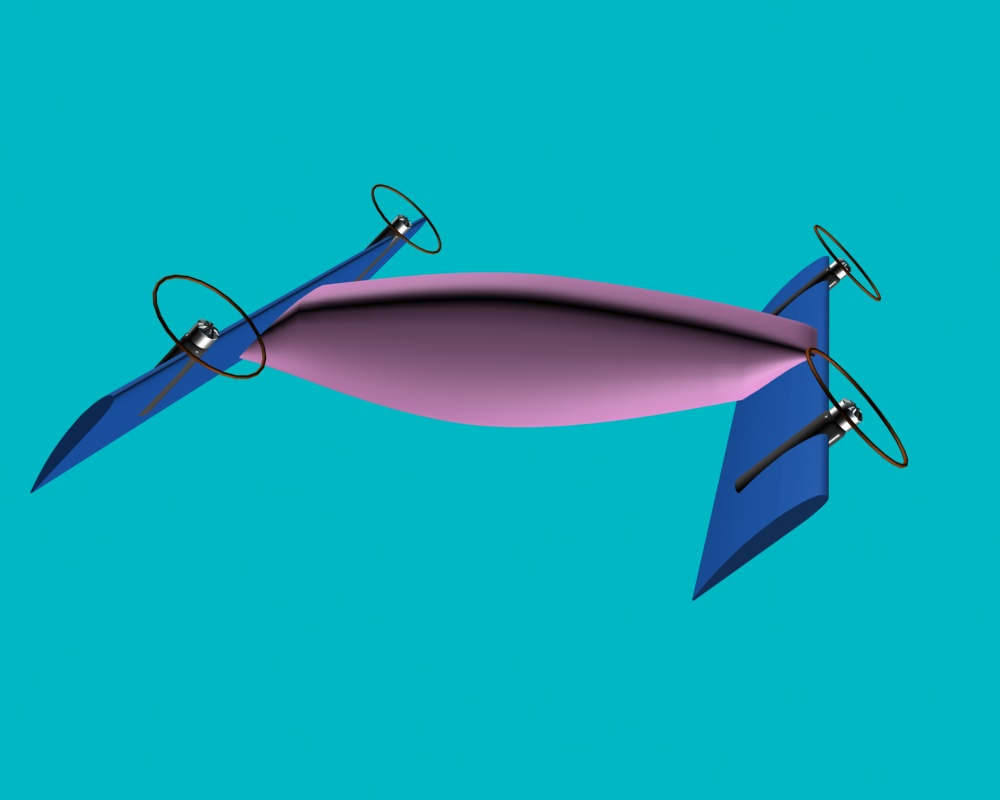
This is a sketch only. The dimensions are estimated from the video.(Exept the nr of the mots)
Do you wish some changes in the proportion, wings, mots?
Will try in the meantime how to design the Propulsion that it works for RF8.
this sketch is beautiful and should fly nicely.
if you want to compare, dimensions of my depron model are
wings : 50x20 cm
longitudinal wings offset : 35cm
vertical wings offset : 20cm
motors position from wings tip: 8cm
control surfaces : 20x5 cm
lateral fuselage surface : 4 dm²
longitudinal CG position : 19 cm from front wing leading edge
vertical CG position : 9cm front front wing
both wings same incidence, board airfoil
2 triangular vertical stabilizers on rear wing only 0.6 dm² each
All four control surfaces are elevon. To pitch up, front wing control surfaces are deflected downward and rear wing control surfaces are deflected upward.
motors are 5000kv, motors rotation are according to copter X layout
The board wing make sense because this is the lightest solution but a biconvex airfoil would probably give better performances.
@lorbass Great! Your RF8 tailsitters should fly well now using master, and if they don’t, you can always check out pr12869 again But in that case, we would want to figure out what was wrong in master…
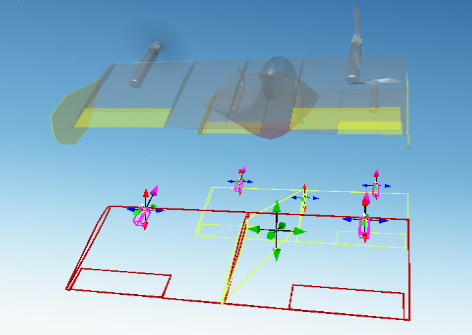
Yes, your sketch looks like it would float, and RealFlight can simulate that. It would be great to see where the waterline is and test takeoff and landing characteristics before getting real hardware wet.
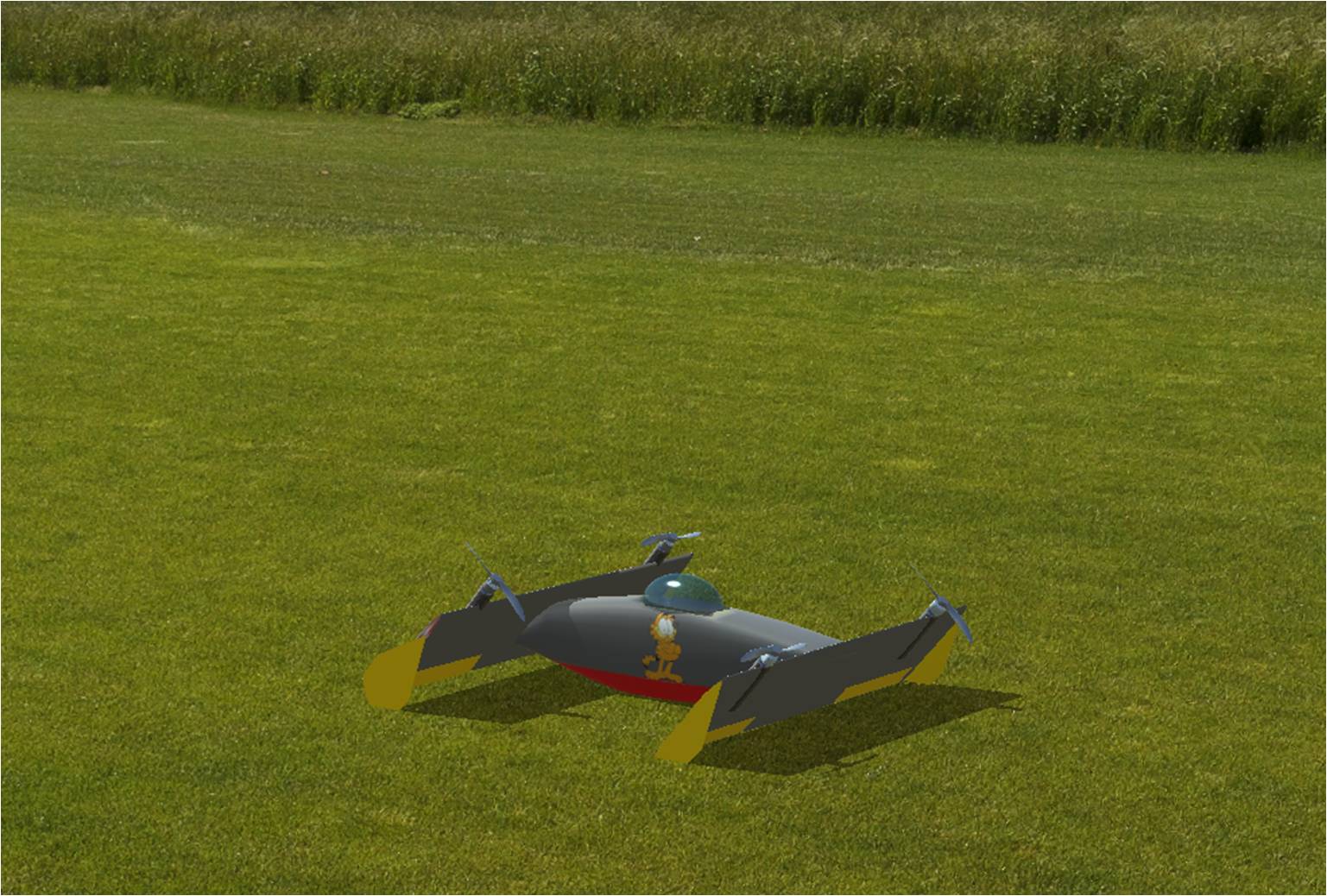
Wow, that was fast, also looks very nice… I haven’t got FW modes working right yet, but found another sitl bug getting this far. The main battery position was wrong, but it floats pretty close to the red/black line.
Here’s a short capture to show the water interactions and the auto-land problem.
Also verry fast airborn. I could profit of the BiWing Design. In the Water it looks better than I thougt.
With floating we are ahead of the Original BlackFly.
The red bottom is the Underwater coating as usual for Boats.
I’m shure you will be able to solve the new challenge with landing. May beby cutoff the back motors when touching the ground.
This behavior was also with the verry early (8 years) Copters as RTL was “inveted”. No idea how it was solved.
@kd0aij,
May be it doesn’t want to fly in FBW, there is no canopy.
I tried to make a transparent Material for the hood.
I replaced the Model, perhaps you can change it also in your RF8.



 but not shure what I use.
but not shure what I use.