I’ve uploaded a flyable version with parameters to:
It needed the addition of vertical fins on the top wing (same size and shape as the visual, none on the bottom wing even though they are in the visual), and CG adjustment. I also changed some “flotation” values to 100% so it wouldn’t sink.
Also, it needs a SITL bugfix which is in this PR:
Video capture of takeoff and flight in QHOVER, then FBWA, landing in QSTABILIZE:
No, the version I uploaded to SITL_Models, and the one in the video from post 302 is based on your first version, with the physics matching the visual. I wasn’t sure whether the version with canopy would fly correctly since the physics model doesn’t seem right.
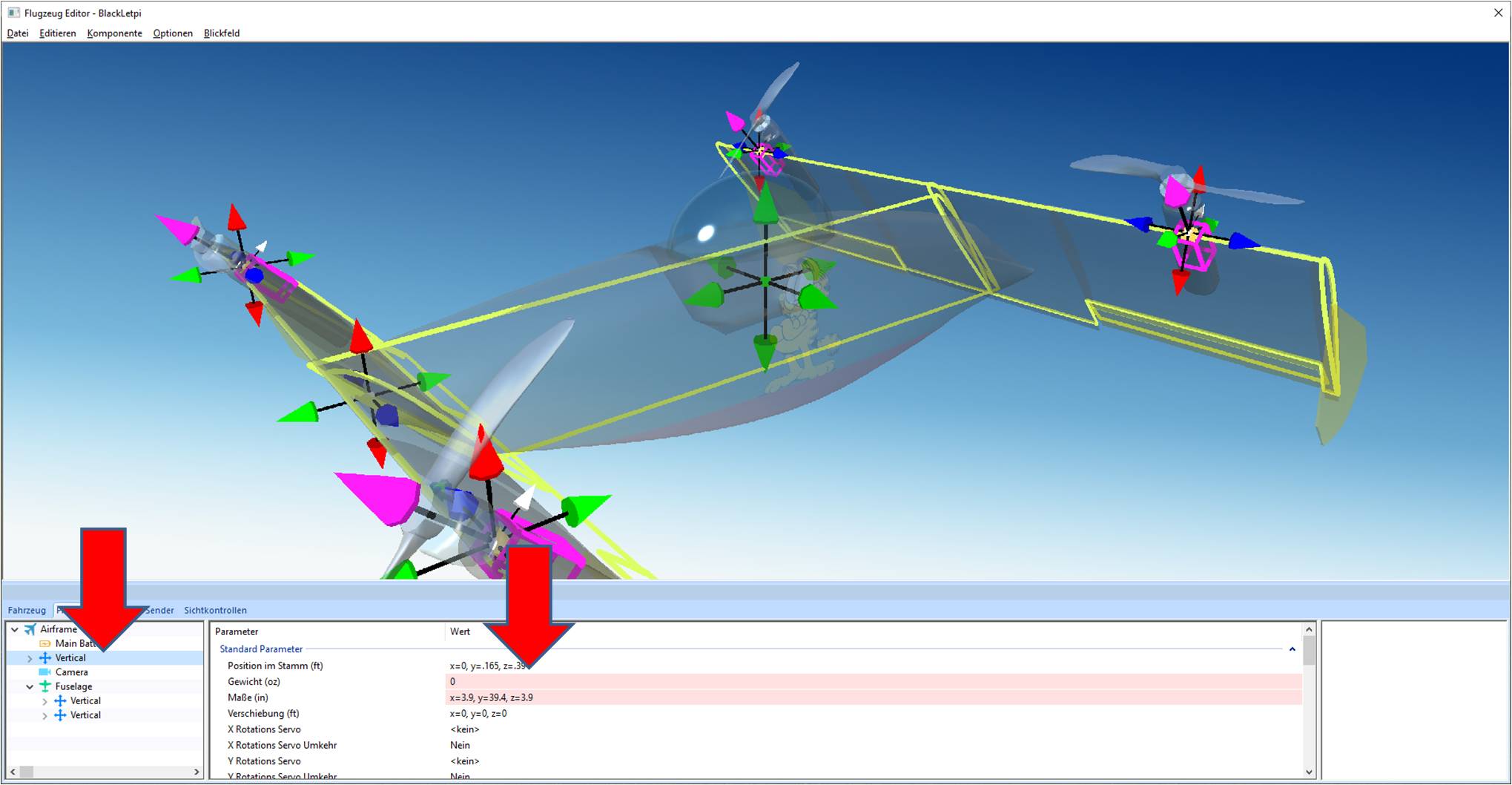
And I couldn’t find a way to fix the problem in the RF8 editor; none of the location parameters I tried had any effect on the offset from physics to visual.
I thougt you did it for some reason, e.g. for floating. Indeed, in my Editor it’s displaced also.
I found how to correct. In Editor/Physics/Vertical you can move it with the z Axis of the top Parameter. This must be done for all 3 “Vertical”.
May be this happened because I lifted the Fusealge in the Drawing of 3DS up to make the Bottom level at the Zero Line. I remembered that Tridge asked this 2 years agon.
Thanks, I don’t know why those position parameters didn’t seem to work before; no doubt I was confused
I’ve updated BlackLetpi_EA.RFX in the SITL_models repo.
It flies OK in FBWA and QHOVER, but has stability issues at high speed in QACRO; looks like an adverse yaw issue, plus a longitudinal stability problem. The physics model for the fuselage isn’t accurate either (the “rudder” object). I’ll look into improving that.
Yes, difficutl to see. When you set the cursor in the field of the nbrs. to change, it is possible to in-or decrease the value by the mouse wheel. But because this small value changes are a little bit retarded or nearly not to see, you may think it has no influence. When you presse the Ctrl. key while rotating the mouse wheel, it makes larges changes, an these jumps are good to see.
Yes, I took simply the vertical finn of the BiWing and forgot to make it better.
Thanks for the tip about control-mousewheel input. That will be handy.
The fuselage currently references visual CS~FUSELAGE, but I don’t see that in the Visuals tab of the editor. Also, other models specify RootFrame for the fuselage visual. Do you know anything about what that is?
All parts should be named ~CS_Motor (Motor as example), Fuselage is allowed with FUSELAGE (without ~CS_) but CS~FUSELAGE would be wrong. I will check it later in the 3DS later.
Normally, one small type error, and RF8 crashes without any info (like a syntax error in a compiler) about the reason.
A frame is a simplified copy of the part (e.g. wing) witch encompasses the original. This to speedup the position calculation in RF8/9 8 (e.g. crashes). But when the original part is already simple (less polygone) it is not nescessary. Often marked after selecting or importing a model when missing.
What is this ?
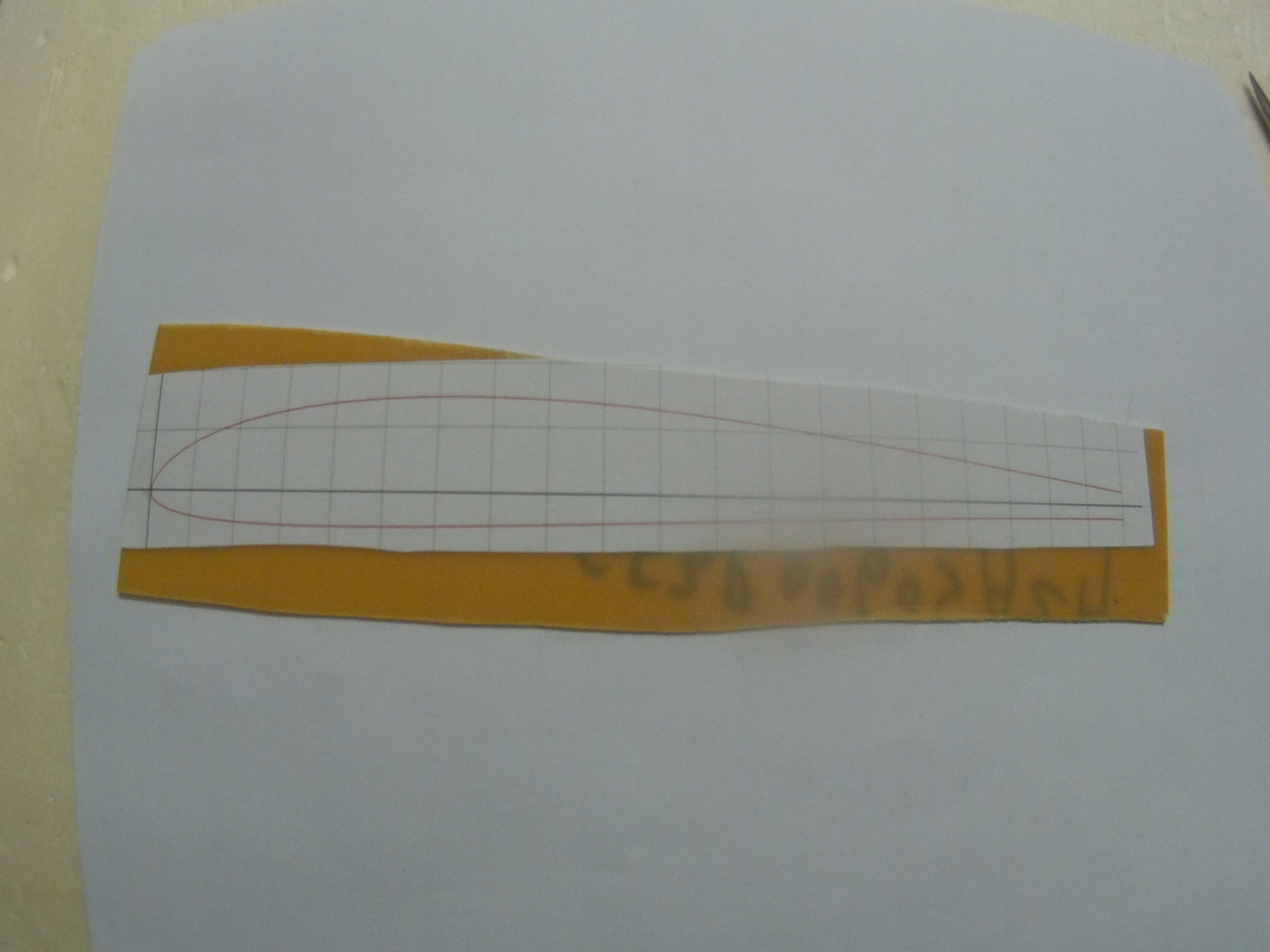
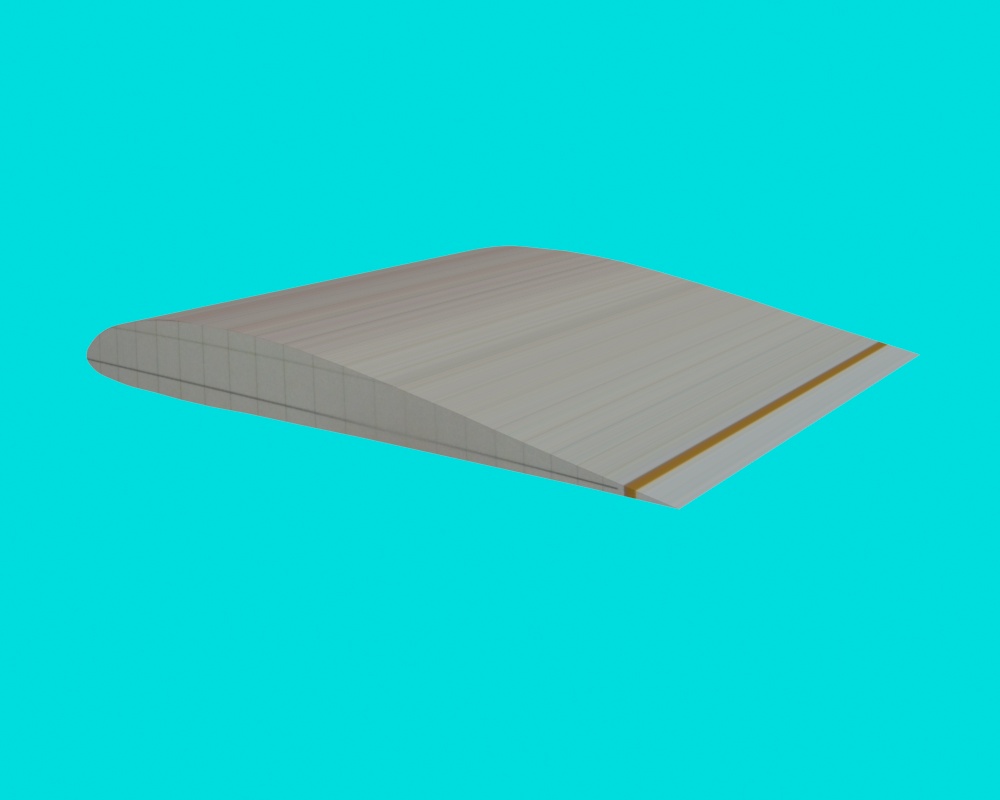
A new flying dream…and the early beginning of a waterproof quad tailsitter, more prosaic a print of S4094 airfoil glued on an epoxy glass fiber substrate.
I found this airfoil on http://airfoiltools.com/ and thought at first the thick trailing edge was a mistake but should be a large advantage to built a foam wing without a protective skin. As wood does not like water and considering I hate epoxy resin and composite materials this airfoil could be a real bargain. I compared polar of this airfoil to PW51
http://airfoiltools.com/compare/index
and found at Reynolds number in the range 100000 (around 7m/s for a 20cm wing cord) to 200000 (14m/s for the same wing cord) the Cl max and the ratio Cl/Cd are very good. The pitching coefficient is fairly negative and would not be suitable for a flying wing but will be good enough for our tandem wing blackfly inspired.
If you wish, I can make the Graphics for @kd0aij.
I understand, you have the problem with the large lake. In our region is no water but Mais.
Did you solve the difficult auto landing with the new FW of Mark as demonstrated in SITL?
This is not easy !! I made some search but not found something appealing.
your drawing looks nice, I propose to use it to make the flying model so you just have to change the airfoil and from my side I just need dimensions.
Auto landing would need a special code that allow the nose to dive. I don’t know if it worth the effort. Switch to q_stabilise will be good enough for me.
To change the airfoil from which Wing (BlackLetpi?)
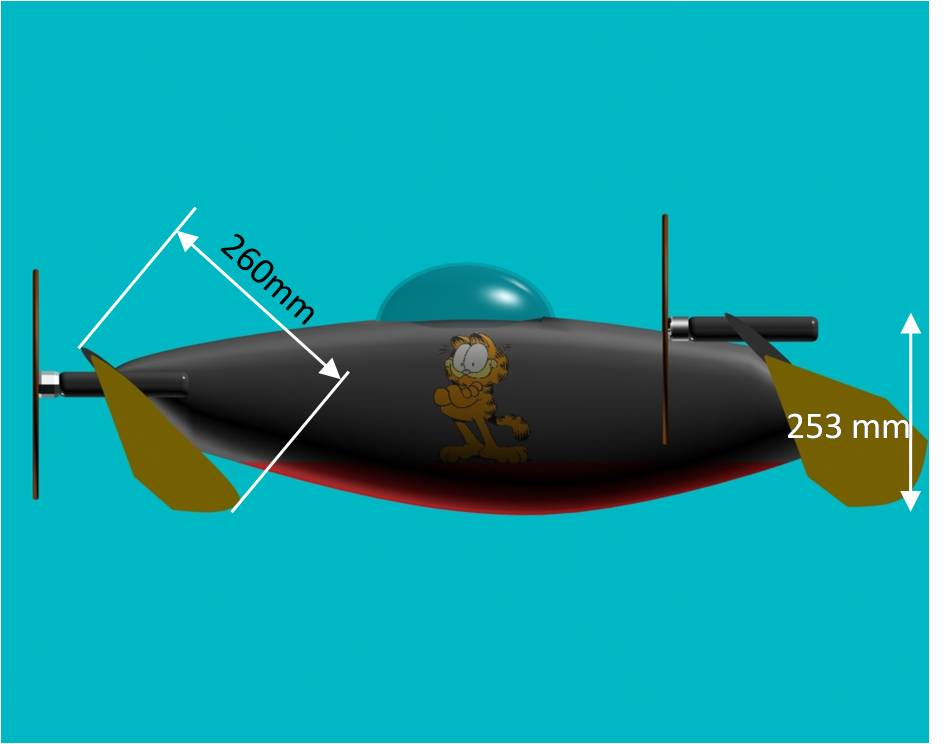
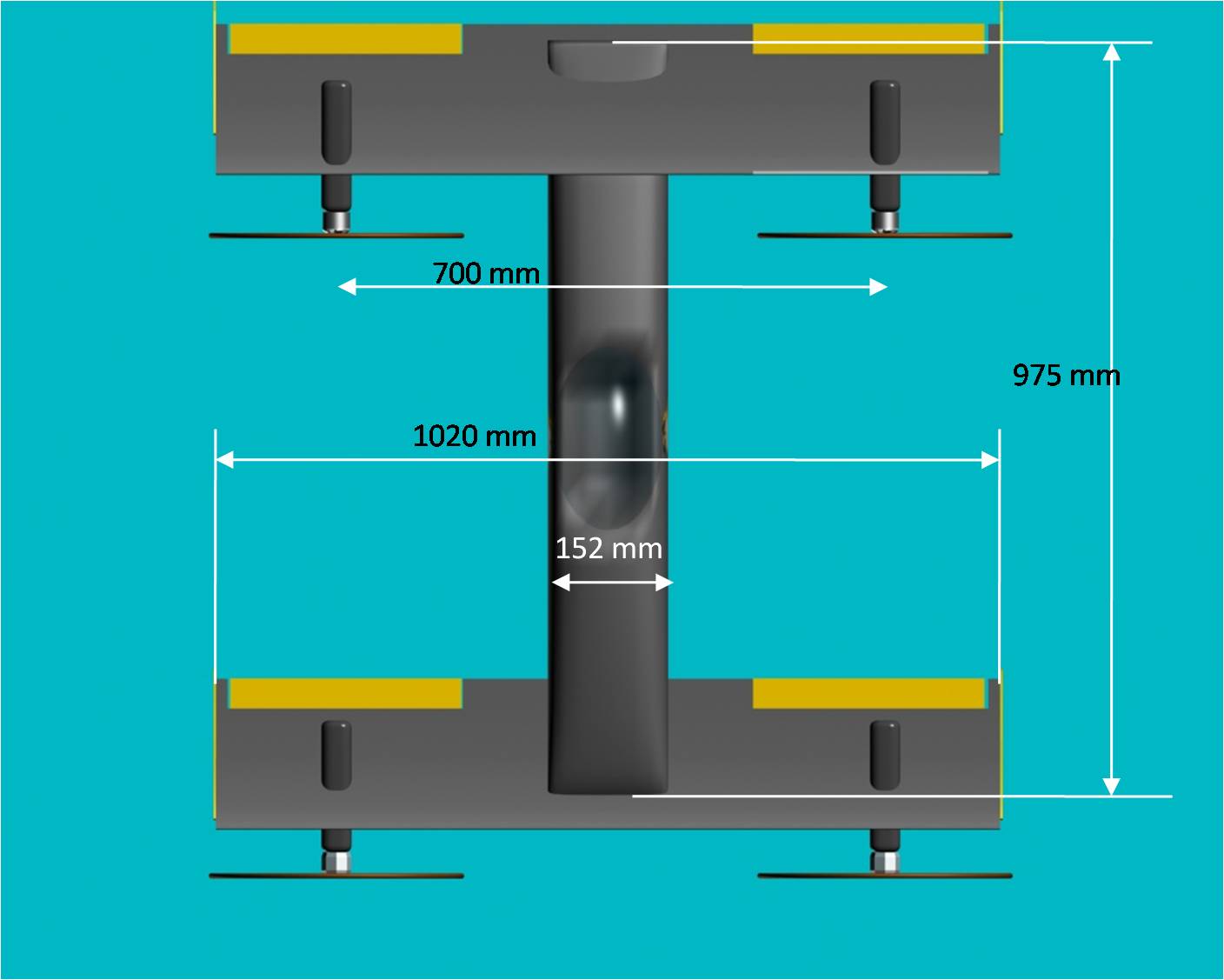
Do you mean the dimension of the BlackLetpi? (Combination of your first Blackwing Trial and the real BlackFly)
This was just an estimation of a view in the video of BlackFly. https://www.cnbc.com/video/2018/10/12/openers-blackfly-flying-car-will-hit-the-market-in-2019.html
I’m not shure, if this is aerodynamically correct. For this you have more experience. Of cours, when you wish “my” dimensions, I post it. Else I can adapt your needs easely.
Don’t be disturbed by the direction of the mots, they have to be drawn this way in order to work as they should. No idea why RF8 needs this.
thanks for the drawing and yes I was referring to your blackletpi drawing. I am pretty sure it will fly perfect provided the CG is in front of neutral point. I will add 1° of positive pitch to the front wing relative to the back one and shrink a little all dimensions by a 0.77 factor in order to get a 20cm cord. I think I will also increase control surfaces size. Its time to build now…
So you make a “Model reduit” of BlackLetpi Will be nice to see it in reality.
In RF8 the Cord S4094 is not available. In airfold.com I read, the S5010 is similar. Just to get the best result in RF8 may this be good enoughe? @kd0aij had to modify the Fins, may be this has to be considered in your design.
in the Selig family I found S3010 which is close to S4094 : same maximum lift, Lift/drag very close and close pitching coefficient. S5010 has a lower and more stable Cm but less maximum lift.

 Will be nice to see it in reality.
Will be nice to see it in reality.