The target is to know where I made the wrong consideration to learn for future Models.
For me its like a orientation Run (Sport) in my Scool Time. My group where the first, but crossed the finish line from the wrong direction.
One point is I used other ServoOut. This to be compatible with my FC Pixracer with 6 Channels on my Caipirinha Wing. But I adapted also the Servo Functions to this Channels.
I will report when I found the fault.
Thanks for the explication, I searched in the wrong Airfield.
RF8 runs actually on two old Win7 PC’s. Will install it later in a faster Win10 PC and test.
Are your Framerates better than in my Vid above?
The last capture I posted was 1104x768 (not full screen) and the physics frame rate varied between 110 and 130 fps with a 3D airfield and “chase” camera. The frame rates would probably be higher if using a photofield and a fixed camera. But the builit-in (xbox app graphics window only) capture seems to have no impact at all on frame rate.
Without video capture my Framerate is at 340, with video capture around 60.
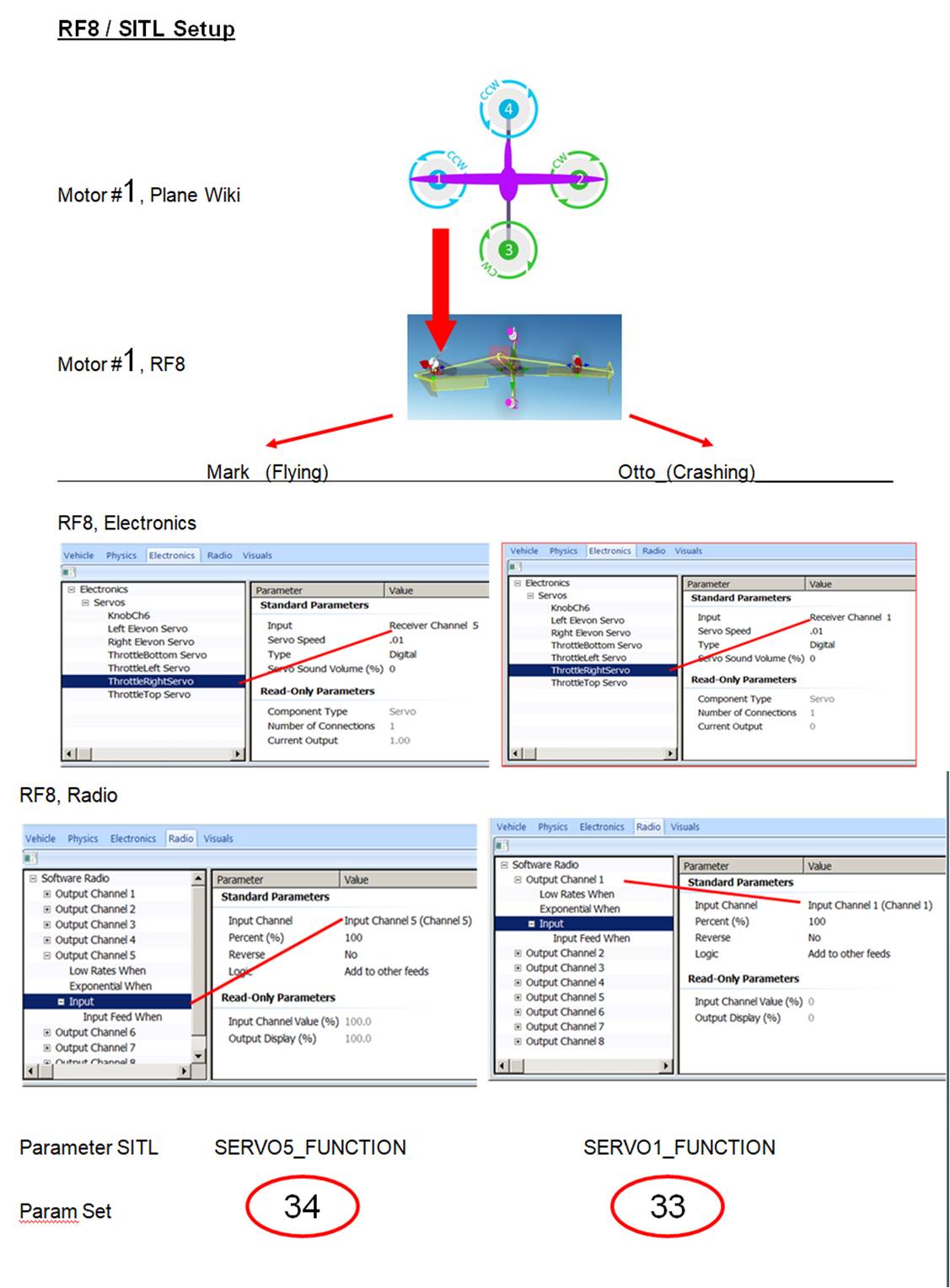
In the meantime I compared both RF8 Versions at first for the Motors only.
To simplify the docu, I showed the Setup for Motor 1.
In a short sentence:
One version flies but do not correspond to the Wiki, the other version correspond but do not fly.
To justify my statement I tried to document my findings as good as I can.
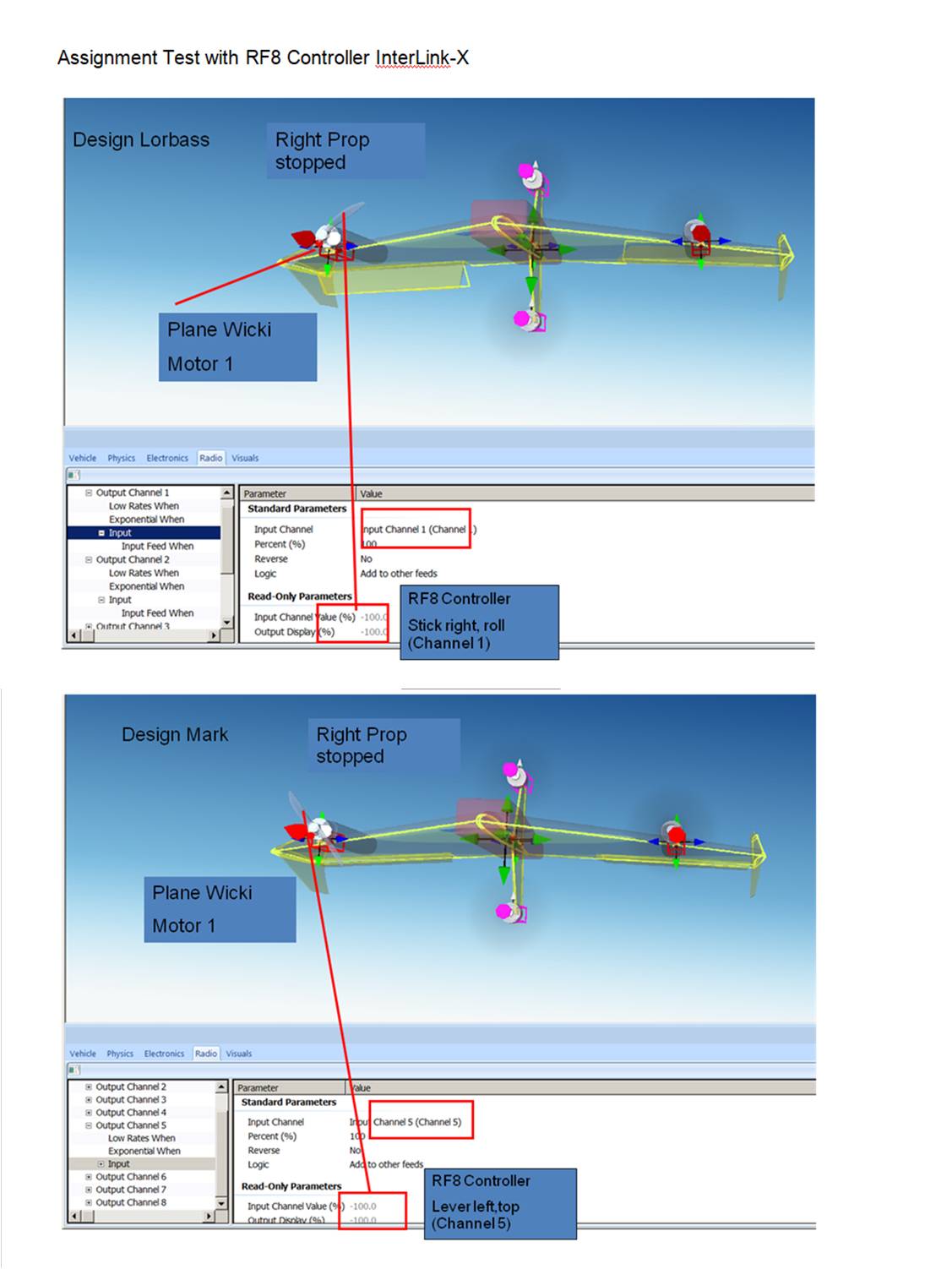
Please have an eye on it. The last pic was to proof which Mots turns with which Channel without SITL
So you suspect the swap in Flitaxis. This means, in a real FC it works correct. Would be interesting to know, which SERVOx_FUNCTION (33 or 34) @losawing has used for the right motor in his Hacker Wing.
(I avoid mentioning the numbers in order not to start discussions where is #1)
@lorbass, Motors layout in the tailsitter wiki are exact. They are in accordance with copter motor layout assuming the arrow point the plane belly (so tailsitter drawing is 180° rotated along the fuselage axis when compared to copter). Nevertheless motor rotation are not the same. From the beginning I considered copter drawings and when I want to add torque yaw control I also consider motors rotation according to copter.
My jet wing (quad plus) is still ready to fly and I will check motor layout this evening.
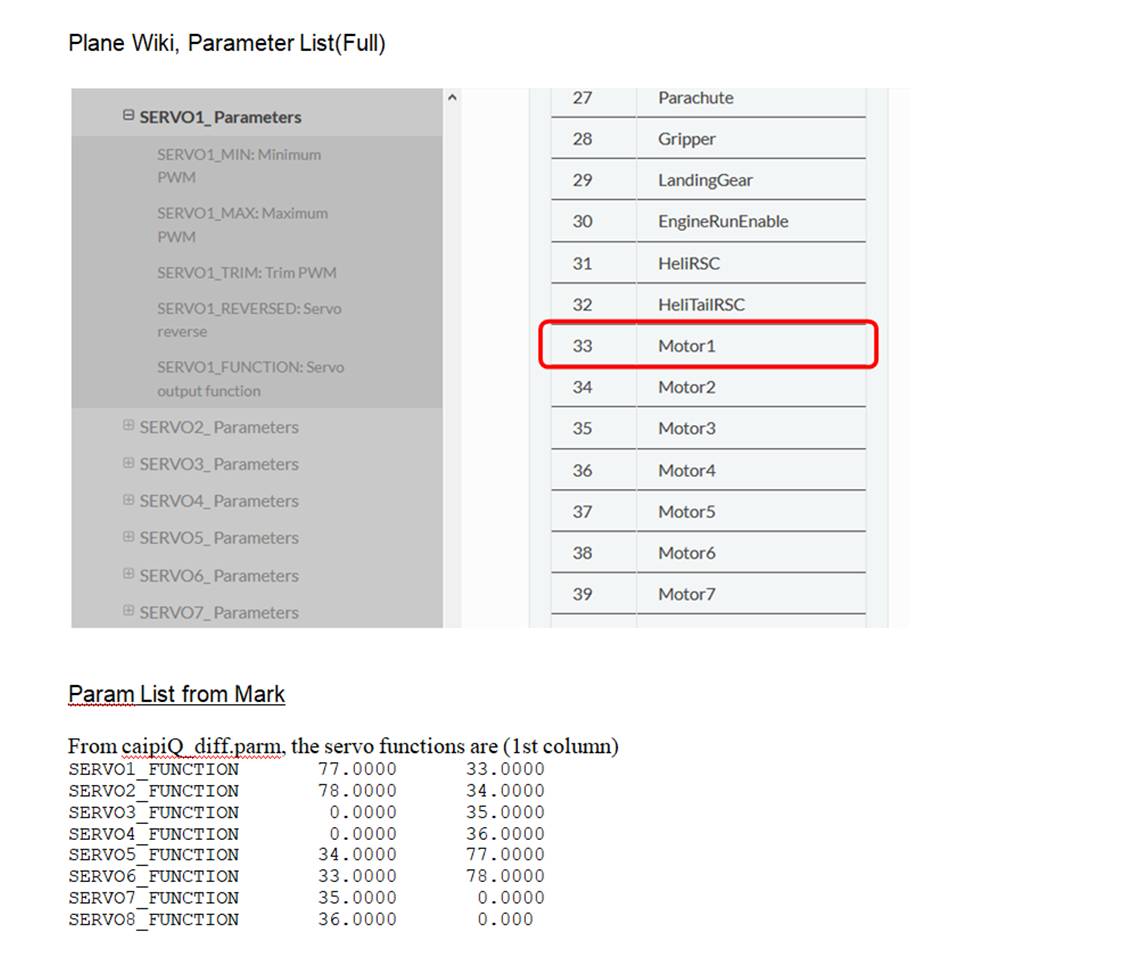
Thanks for checking. In the meantime I got “my” Version of Caipirinha Tailsitter flying with the Setting 1-4 for Motors and 5,6 for Elevons with the corresponding Servo Functions like Mark.
Mot 1, right = 34
Mot 2, left = 33
Mot 3, bottom = 35
Mot 4, top = 36
Elevon left 77 Reversed
Elevon right 78 non Reversed.
This is the configuration of my jet wing quad +
servo2 = 77
servo3 = 78
servo5 = 34 connected to motor left wing
servo6 = 33 connected to motor right wing
servo7 = 35 connected to motor bottom
servo8 = 36 connected to motor top
Concerning RF9 I have a problem with the identification number, I am complaining to the seller. The SCP driver indicated by Mark seems to work as my dualshok is connected by USB and found by windows.
The connection of my Taranis X-Lite to the PC as Joystick works also. But in RF8/Controller/Edit, Channel 1 to 4 moves only. The controller has also an important red button to reset or restart the connection to Flitaxis. Therefore I repaired the broken gimbal part of the controller even verry difficult. Would be interesting to know how it works wit your system. If yes it’s the cheaper solution.
An other video… not very spectacular. I think this is the first time I fly auto with take off and landing and do not manually abort landing. Take off is very nice but landing fail.
About 10km/h of wind, not a lot but still a strong wind for this 150g model, the lean angle is already 50° during the descent. Some roll oscillations too that I do not have with other modes.
yes, an other one. I had 1105 motors+esc+BEC+RX from a former quad that was slipping in my workshop. I had also 3g servo, depron and carbon rods from former F3P plane and the pixhawk + gps taken from my batwing. The result fly perfect thank to ardupilot because manual mode is very bad and ended in the lake one more time…Some drying later, an other video.
I think the black fly design is very difficult for landing because the tail land first and then the nose has to descent a little. This may cause a bad interpretation by the controller and then a throttle surge.
Yes, auto landing will probably need some special code to allow the nose to drop at touch-down.
It probably didn’t help that the position control gain seemed to be too high also.
Motors and control surfaces respective position suggest the copter yaw is only controlled by differential thrust. This assumption is confirmed because motors are tilted. Motors rotation direction are opposite to arducopter quad X layout, it means motors tilting should be opposite (inside vs outside) with copter tailsitter. frame type=1
Yes, I think also.
It seems the Axis of the upper and lower mots are not parallel. Can this improof the stability in Hover Mode like the V of Plane Wings?
DJI used this also for the larger drones.