thanks for the info, I will try this WE
I also found that hobby king provide a very cheap wireless dongle compatible with D8 frsky protocol but I dont think this dongle to be compatible with RF9. Do you have any info ?
Yes, really bad quality of the plastic Part in the Gimbla. Broken wherever a metal part was casted.
A good advise, thank you. It works for my Taranis X Lite. But still fighting with the mapping of the channels
in RF8/select Controller/Edit or calibrate.
Did you upgrade OpenTX and the TX to Version 2.2 or higher? OpenTX 2.3.3
Really complicated, so my Taranis 9D runs always with 2.1
And there is nothing to select like USB and Joystick.
But with my Taranis X Lite it works. When Power ON and connected to the PC, it loads a driver and is ready to play. (No pushing the trims while Power On as usual for connection to OpenTX)
And just bevor the part in the Intelink has broken, I found the way to use RF8 on a single PC.
- Start VcXsrv as Mark posted in 162.
- Start RF8
- Start MissionPlanner/Simulator and select in the Field “Model” flightaxis and click on the Plane. It connects itself and “flightaxis” is to see in RF8, left, down.
- Load the params as usual in MP/Config/ from a xxx.param File and write it as usual with a Flight Controller
Without VcXserv we see always a lot of AHRS Errors in MP/Hud and arming is not possible
And on a single PC Win 7, the Framerate is 500 (2 PC via LAN about 300) much lower when video capturing.
Amazing, the Caipirinha2 behaves exacly as in reality with the same Params, now.
https://drive.google.com/open?id=1iJQHI9Kc9L8uyTNGswEvdMeqXy-1zcne
It is now worth fighting with the (hopefully last) issue mapping of the Controller. ![]()
Edit:
With Taranis X Lite I can use 4 channels only, and the red button, which reset and starts flightaxis is missing. Try to glue the broken Parts.
@kd0aij,
Hello Mark, I have finished the copterTailsitter on the base of the Wing Caipirinha. This time, I’m satisfied with the Model in RF8, all Props are to see and works. I defined the Mots 1 to 4 on Servo 1 to 4 with Function 33-36 and the elevons on Servo 5 and 6 with Function 77,78. May be, this is wrong because in RF8 it behaves crazily. The mots rotate even disarmed.
Can you have a look on it?
RF8 Model
Parameter
1 Like
Hi Otto,
I got it to fly in RF8 with q_frame_class=16 and ahrs_orientation=25
The CG had to move forward about 5cm though.
Prop visuals look good to me 
I changed the servo order in the model to match the rest of my quad tailsitters:
channels 1,2 are elevons and channels 5-8 are motors
Here’s a link to the parameter differences that should matter:
and the full parameter file from SITL:
I didn’t spend much time tuning, but it seems to fly OK with those parameters.
Hello Mark, thanks for analysing, a lot of work if I look the Diff.Params.
I tried to do my best with reading your discussion in the Thread and the Wiki to avoid a lot of silly questions. 
@losawing has a similar Wing, but he deleted the logs about.
But there seem to be more secrets behind this.
- In the Wiki is no FrameClass 16 and letpi use for his BiWing also 1.
- ahrs_orientation 25 means Pitch 270 (Probably because it is designed vertical)
Do you think all these Diff Params will also work or needed with the real Frame or is it a SITL related matter? (except SERVO…,RC… )
Will follow your advice and will report next year.
I wish you all the best, Greatings from 
this is a log of my hacker wing transformed to quad +
This log is dated from the 6th of august. Differential thrust was enabled and tailsit_input=3 mean aileron on RCin C1. Servo3 and servo4 were still declared as tilt motors but the mechanism was removed.
Greetings, hope to see your caipirinha flying soon.
Hi Leonard, verry kind to post the log again. I need to learn, my caipi still makes “salto mortale” in SITL after takeoff.
Corresponds your setup this pic in the Wiki? (Seen from top)
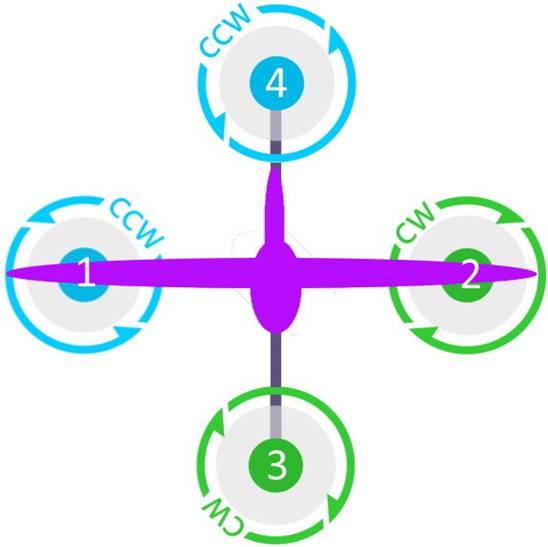
@lorbass The new (copter tailsitter) Q_FRAME_TYPE=16 in master is equivalent to the frame_type=0 option which @losawing was using in my old PR branch. It disables torque-based yaw control, which causes instability in the plus-frame quadcopter tailsitter.
You should be able to get it to fly in RealFlight SITL just by changing the frame_class and ahrs_orientation parameters, as long as your servo_function parameters match the RealFlight version of the model. You may also have to move the CG forward for a stable hover, certainly for stable FW flight.
I’m not sure about Mission Planner, but mavproxy has a command “param load caipiQ_diff.param” which makes it easy to change a subset of parameters.
Happy Holidays and New Year to all!
Do you mean q_frame_type=16 ? q_frame_class is for choosing the frame type: quad, hexa… or may I miss something ?
Probably yes, it was wrong in my question ![]()
Could you tell me the assignment Servox to the Mots (left,right,top,bottom) it jumps up and tilts in QStablize or QHover uncontrolled.To short to learn in the Log. Can’t believe thats only the CG.
I found another “new” Param value in the Param Diff: AHRS_EKF_TYPE 10.0000
@losawing Thanks, I meant frame_type. I corrected it above.
@lorbass I’ll export and upload my version of the model to the git repo. Radio channels 7 and 8 had no inputs assigned, and I set them to inputs 7 and 8.
Servos 1,2 are left,right elevon
Servos 5,6,7,8 are right, left, bottom, top motors
From caipiQ_diff.parm, the servo functions are (1st column)
SERVO1_FUNCTION 77.0000 33.0000
SERVO2_FUNCTION 78.0000 34.0000
SERVO3_FUNCTION 0.0000 35.0000
SERVO4_FUNCTION 0.0000 36.0000
SERVO5_FUNCTION 34.0000 77.0000
SERVO6_FUNCTION 33.0000 78.0000
SERVO7_FUNCTION 35.0000 0.0000
SERVO8_FUNCTION 36.0000 0.0000
AHRS_EKF_TYPE 10.0000 is for SITL, it uses the RealFlight attitude estimate and has the best stability. You must have low-latency communication between ArduPilot and RF8 and high frame rates to use types 2 or 3.
Thanks Mark,
I see a possible reason of my crashes. In the Wiki with the Diagram above (Post 247) Motor #1 is designed left, but seen from top is is on the right wing. And in the Full Parameter List Servox_Function #33 correspond to Mot #1. So I did it, but in your setup #33 is left. Because your definition flies, the Wiki image must be wrong. ?
Will check it with your RF8 Model.
Servo functions 5,6 are ThrottleRightServo, ThrottleLeftServo
and they are assigned as 34,33 which is right=motor2, left=motor1
I thought this was correct in the wiki, but apparently not.
It looks like bottom/top = motor3,4 is correct on the diagram.
Edit: IIRC the wiki diagram is correct, and verified using actual copter tailsitters by @losawing @hwurzburg and myself. There seems to be something swapped in the RealFlight models instead. To verify the problem is on the RealFlight side, I tried setting up your new caipirinhaTailsitter as a quad plus frame in ArduCopter, and it also needed motors 1 and 2 swapped to be stable.
I swaped Motor 1/2 and it is stable in QSTabilize and QHover. The lift off is critical and it needs a Jumpstart to get control.
However I had to set Elevon left to Reverse and Elevon right not. They move so correctly checked in Mode Manual. Thats oposite to your Params. I use Q_TAILSIT_INPUT = 0.
But perhaps due to this, in FBWA it starts to rotate in the Roll Axis and crashes.
Did you test FBW?
In order to test this, I set one motor(Servo) after other in RF8/Edit/Electronic to the knobCH6 of the RF8 Controller. So it’s possible to observe which Prop is rotating slowly and on which direction. Then this Servo (e.b. ThrottleRightServo) has to set again to the corresponding Receiver Channel.
And I did not find wheres the swap.
I did not found it so far.
Sorry, I forgot to push my changes. My version and parameters are there now:
It flies OK in FBWA, and elevons look right in manual mode.
qhover demo:
Hi Mark, Thanks for your assistance.
I’m verry interested to find the issue in my system.
In the meantime I can liftoff verry smooth like a llarge rocket. The reason for the need of a jumpstart was a bad AHRS_TRIM_Y. The horizon in the MP Hud was alsways too low. Accel Calibration didn’t help.
Mots left/right are swaped, but also Elevons Reverse.
I had to increase Q_A_RAT_RLL_P and D. Now Roll is OK but with about 45 Pitch it starts to Roll or Yaw.
But at first I will download and share your success. 
Hi Mark, good news in the new year.
Your Model and Params works perfectly.
I only had to increase Q_A_RAT_RLL_P and D, as well as PTCH2SRV_P. (Framerate 350)
It is even possible to fly aggressively (for my knowledge) in FBWA with perfect Transitions.
In FBWA exactly as I did it with Caipirinha as vectored Tailsitter.
Unfortunately I can’t make a video, with my Video App Wonderhare Filmore because the Frame Rate drops to 60 FPS and then the attitude is bad.
But, I’m not satisfied, I want to know why my setupt works so badly. 
Therefore I will compare character by character of both Setups to find the reason or your magic.
Anyway, thank you it makes fun and motivate to order the material for the real Wing.
Just a question: How is your setup in RF8 to fly behind the Wing?
1 Like
Congratulations for a great start to the new year!
I hope it’s not too difficult to find the differences between your setup and mine.
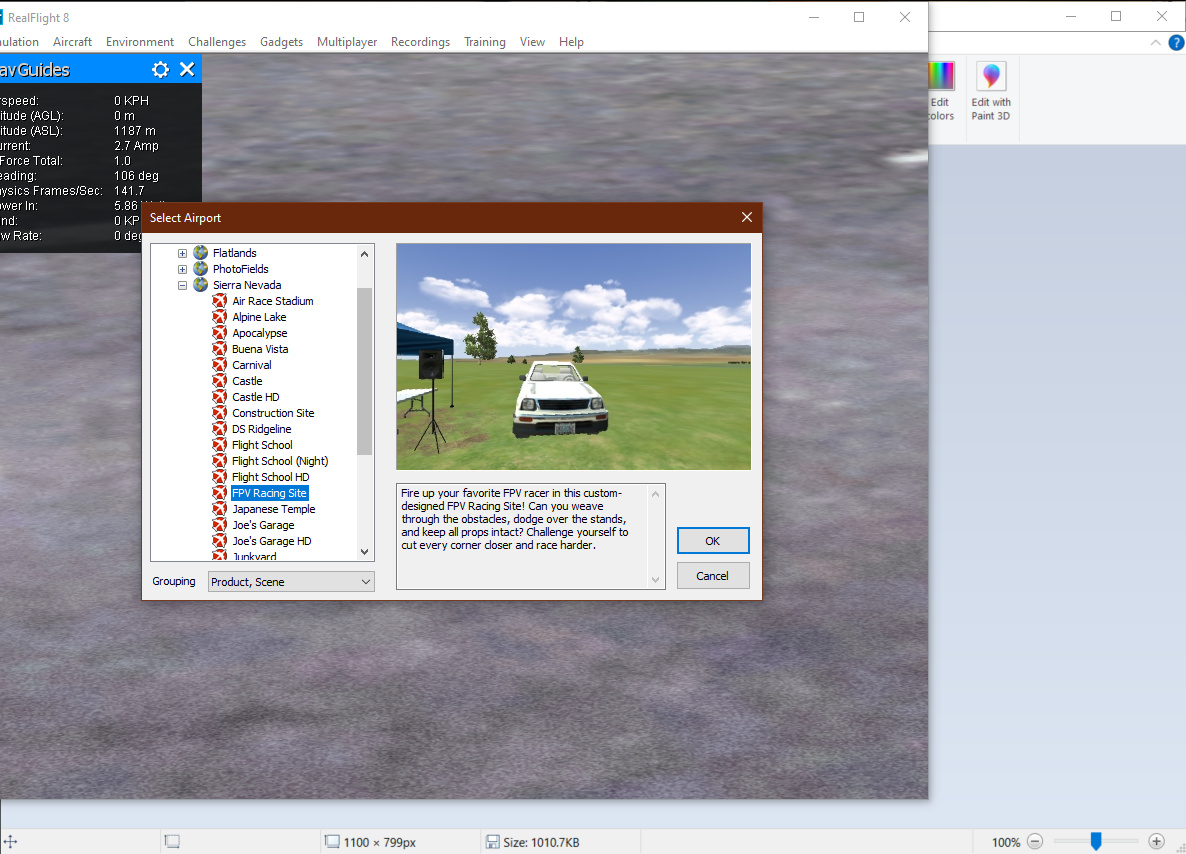
The RealFlight “chase” view is available in any 3D (non “PhotoField”) airport environment:
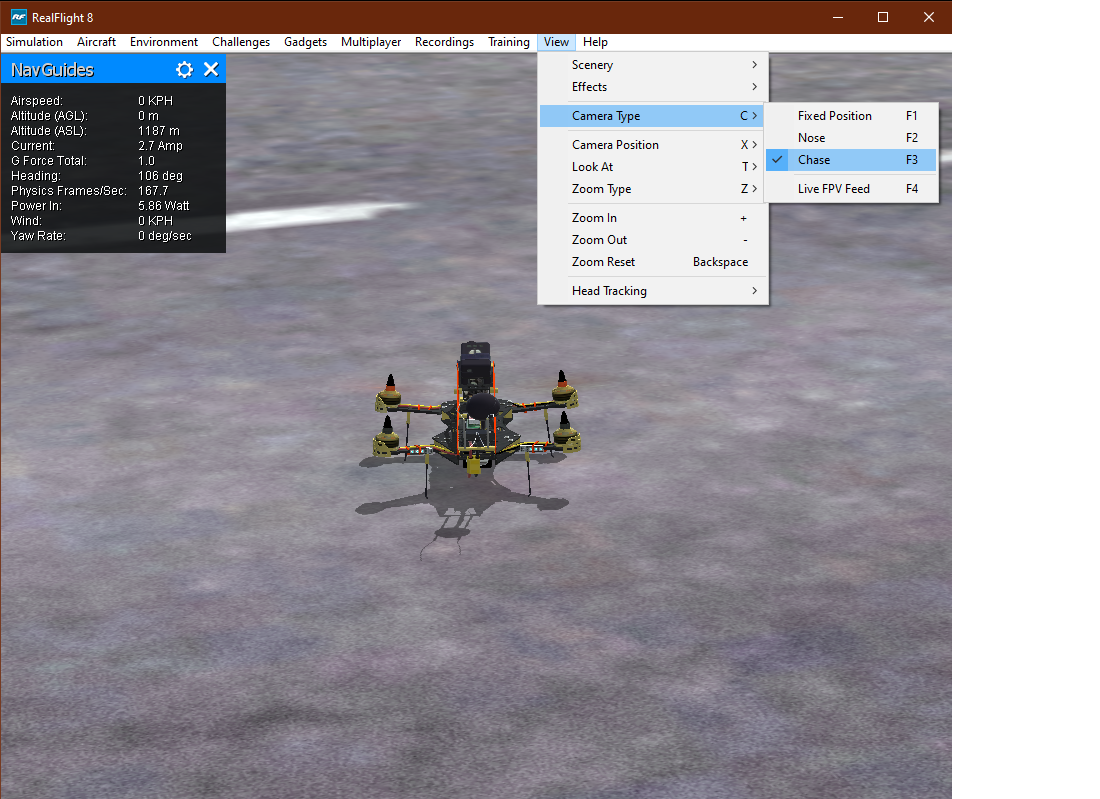
In a 3D environment, you can also choose Nose camera and add additional cameras to any model like the ones I added to the Convergence to show motor tilt.
Have you tried the built-in Windows 10 screen recorder? That’s what I’m using.
It fly also with a low Frame Rate while recording a Video from the Screen.