Hey @iampete I did bench test with this branch. It works. I had built the firmware from this branch 20 days ago. Is it available on latest master?
git checkout iampete1/tailsitter_tri
git remote add upstream https://github.com/ArduPilot/ardupilot.git
git fetch upstream
git rebase upstream/master
Thanks @iampete
I’ll update you soon!
Hey @kd0aij
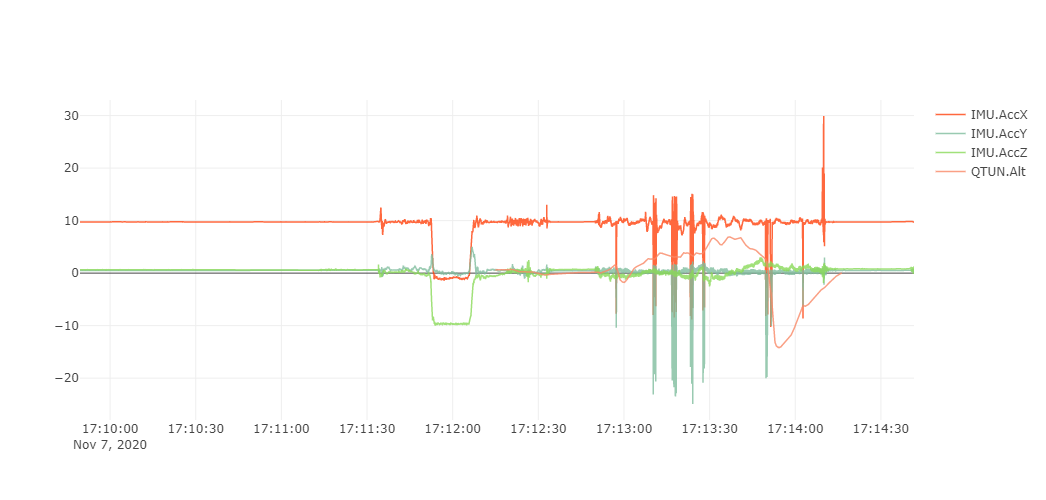
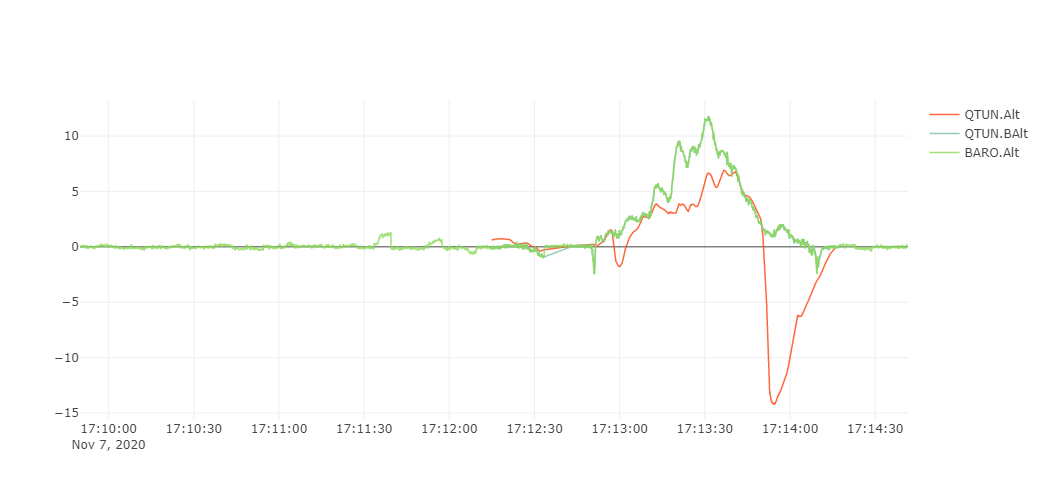
I have this issue of throttle pumping in althold mode. Looks like it’s happening when Accel have noise in them. The aircraft climbs rapidly in a jerky fashion. Initially i thought it was just throttle tuning, but looks like its not. I’m using CubePurple, do you think switching to one with damped imu helps?
Can you look at the logs and give some suggestions?
Thank you!
https://drive.google.com/file/d/1pEEiIxI5kt-asHQIlSb8-zeXHwKUkaex/view?usp=sharing
https://drive.google.com/file/d/1daszmPpg8q0q2QzuTypeAa9XfX2dKw7H/view?usp=drivesdk
That really looks like excessive vibration, although it’s hard to tell cause vs effect in the log. I’d try a little vibration isolation on the FC first.
But vibrations were well under 30m/s². I get lot of velocity and position disparities when this occurs.
In my experience that behavior has always been due to vibration, so I’d rule that out first.
But YMMV 
Hey @iampete @kd0aij
I did couple of short flights on Tri-Tailsitter. Works good but I have to build the firmware based on latest master with EKF3 fix and try again. The yaw feels very sluggish, any suggestions for yaw tune? Rest works fine. Needs a bit of tuning.
Thanks for Tri-copter tailsitter support guys. I have attached logs below, let me know if you guys have any suggestions.
https://drive.google.com/file/d/15mtjfX0Ak26HGXB46_rvVpoVpim1mvKF/view?usp=sharing
https://drive.google.com/file/d/1Dh6gtp2Nz5mEupNXcwspyRNt8Y1rWcli/view?usp=sharing
Video
https://drive.google.com/file/d/1YlNbtvHR-3qzRFgYBqFY1IEokTAtGoyj/view?usp=sharing
2 Likes
Hey @kd0aij
Moved to CubeOrange. The issue is solved. Did a flight with frame_class=0. I’m seeing unequal motor output during hover. I could feel motors on wings were pretty hot and ones on the tail were cold to touch.
https://drive.google.com/file/d/1gi34VvrmX2h5zNlC9AEud0-f9g-XmMET/view?usp=drivesdk
Video: https://drive.google.com/file/d/1rFxhdetVfjJvUXnIfvwwCuHyoxA5x8jr/view?usp=sharing
Can you have a look at the log and share suggestions?
Thanks.
Which motors are on the wings? 1 and 2 are running harder than 3,4
1,2 are on the wing.
Is the CG closer to motors 1,2 than 3,4? If so, then the wing motors would need to be generating more thrust than the tail motors in hover, and should be sized appropriately.
Yes. CG is closer to 1,2. But in vertical flight, should it make this different?
Wait… I was thinking this was a standard quadplane, sorry.
Offhand, I’m not sure why motors 1,2 and 3,4 would have different average PWM outputs for a quadcopter tailsitter in hover. Will need to think about it some more.
So the “purple” cube is essentially a Pixhawk 1, and the “orange” has a vibration isolated IMU?
The color of the box doesn’t tell me anything useful about what’s inside
If so, then vibration isolation was the cure to the throttle pulsing problem, right?
Yes. Purple is single IMU without vibration isolation. The orange has 2 IMUs isolated & one without vibration isolation.
Yes. You were right. ![]()
I can’t tell which IMU is isolated by looking at the accelerometer logs.
It would be interesting to run an FFT analysis to see what the vibrations are like; are you familiar with the batch logging and FFT stuff?
Yes. I’ll do it today and share logs. 
I made a third quad plus jet wing always trying to get 300 km/h with a tailsitter and this is done . 

The wing is a little smaller, motors are bigger and I use a more powerful 6s 70C battery.

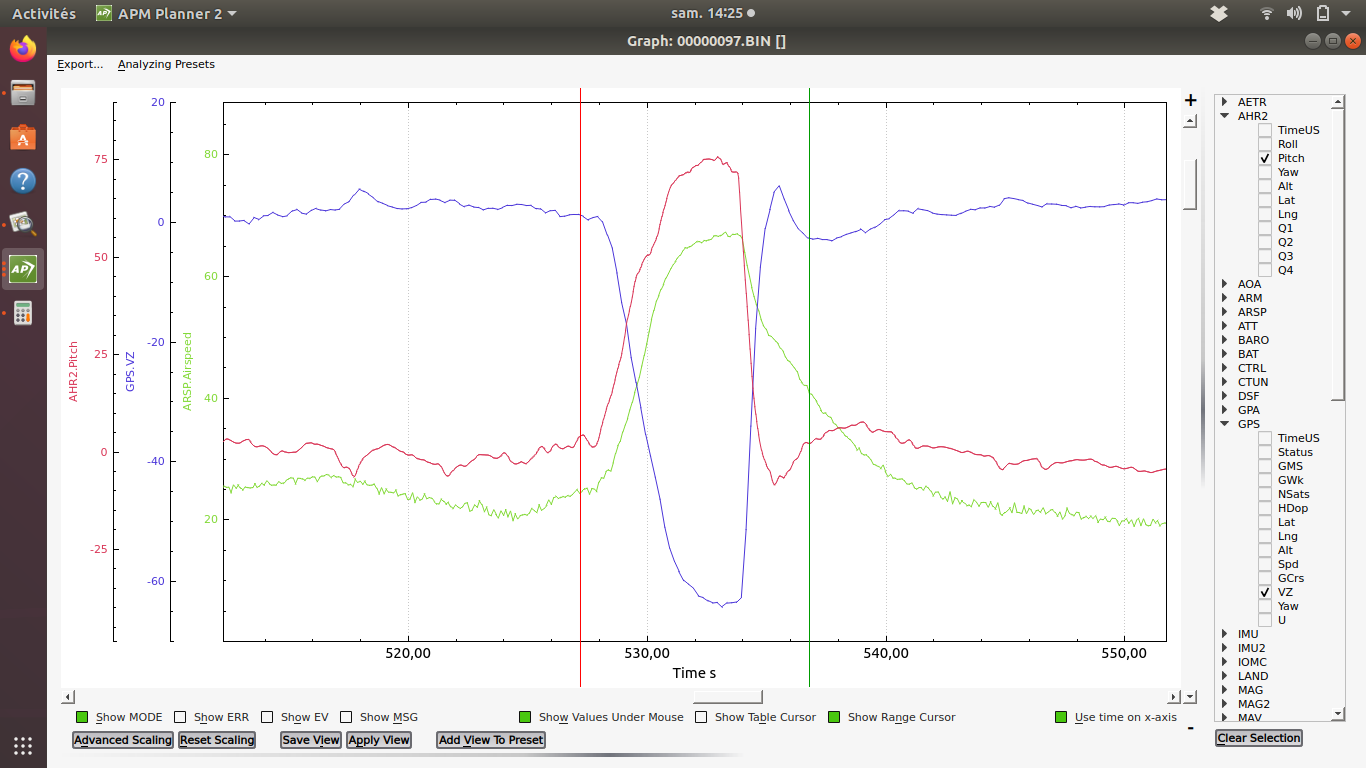
This log is about 2 run with yaw in one direction and other direction almost 180°. In both directions max airspeed is about 84 m/s .Max gps speed are 88m/s and 81m/s. I think gps speed is only horizontal speed so adding the vertical speed would give a higher speed.
An other interesting speed is max vertical speed about 64m/s.
Batterie graphene 2.2Ah 6s 70C, max curent is well over 120A @ 18V. Current exceed sensor capacity so I cant say the max.
Motors sunnysky 2212 2600KV on wings and viking 2208 2600kv for top and bottom.
Propellers emax avan s 5*7.5.
ESC multistar 51A 6s
4 Likes
Thats nuts! Great work!, Should probably ring up Guinness,
Your 25% faster!
1 Like
@losawing that’s a great looking aircraft! You clearly put a lot of time into it. What are the fuse and wings made from?