Yes, I explained it not good enoughe. I meant not RCIN … as defaults. When the defaults are completed or modified by other groups, this should be saved for a next time when clicking OK. Like other configs in MP e.g. language, Log Path or the items in MP/DATA/Quick.
We’d need to ask Michael how to accomplish that. I’d suggest you submit an enhancement request on the MP repo.
Or, we could just change the default to include everything that anyone might want to display…
To incloud everything would explode the .csv File for such who don’t need it.
I’m shure for Michael it would be an easy job. But my english is not so good to explain it good enoughe as already demonstrated and @hwurzburg hat already contact with him in this matter ? ![]()
I thougt it as idea to complet the perfect solution. With this easy Dashware conversion and Wiki it should find more friends.
Great, exactly all said in a few words, thank you.
Still fighting with the Yaw instability in QHover Forwardflight.
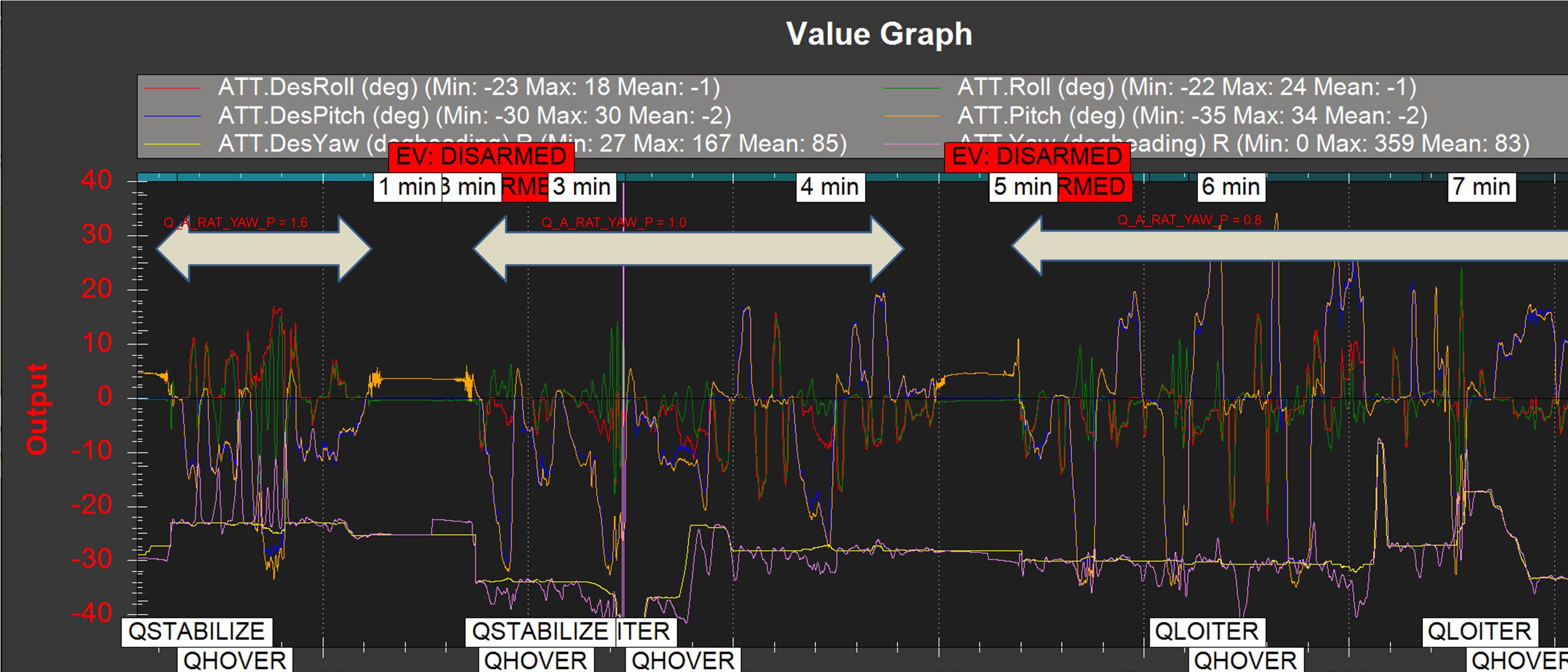
The wing ist stable when no pitch is applied. If the wing piches, the upper mot is reduced, some time until nearly zero. The CG is where it should be for Plane Mode. As I noticed that the Roll Oscillation (Plane sight) depends on the PIQY P, (not PIQR), I made 3 Tests with Q_A_RAT_YAY_P as in the graph below. I seems with lower P there are less Oscillation and less cracy Elevon actions. May be with increasing speed, the elevon effect is higher and produce with the set params this instability. But without Pitch the Yaw ist already sluggish and to reduce P even more I’m afraid it is not stable inoughe.
Is the Torque base Yaw control to low with this small Props (6 ")?
Log: https://drive.google.com/open?id=1AeA7gwPxEUd9mXDtMh5o81MFm-oo7kI-
It will certainly become unstable in body-frame roll when you pitch the nose down and pick up airspeed if Q_A_RAT_YAW_P is too high. That is the reason for Q_TAILSIT_GSCMSK = 2 and Q_TAILSIT_GSCMIN = .4 (default). This reduces all control surface gains as you pitch down or raise throttle above hover. But I see that you have Q_TAILSIT_GSCMSK = 1, so you should try changing it to 2, and possibly decreasing Q_TAILSIT_GSCMIN. @losawing has used values as low as .05, but that might be too low for the Caipirinha.
I wonder why it’s always yawing in the same direction though? Maybe this airframe would be better without torque-based yaw and with counter-rotating wing motors? It would also be informative to try larger props to see if that improves elevon authority at low airspeeds.
Thanks Mark for analizing the Log.
Will have to read what is GSCMSK.
At the beginning a had no torque-based yaw. Then also roll/yaw oscillation until continues yaw. I changed on your advise.
I noticed that the Roll oscillation happend only with pitch down (forwards not backwards)
By the way. This Roll/Yaw Oscillation was to see also in the rack as I tried a combination with Pitch and Yaw. But I thought it was due to the mass of the gimbal.
There is always a new last idea before the end 
This is hard to say if these oscillations come from high gain as soon as the pick some speed or from turbulent airflow on the outer wing surface causing insufficient control surface authority. A characteristic of a staled wing is no authority from control surface .
In the first case, the gain scaling parameter is the solution. For the second hypothesis, larger wing propeller will be better as a larger wing section will be blown allowing control surfaces to be more efficient. Wingtra is a good example as a single propeller is around 30% of wing span.
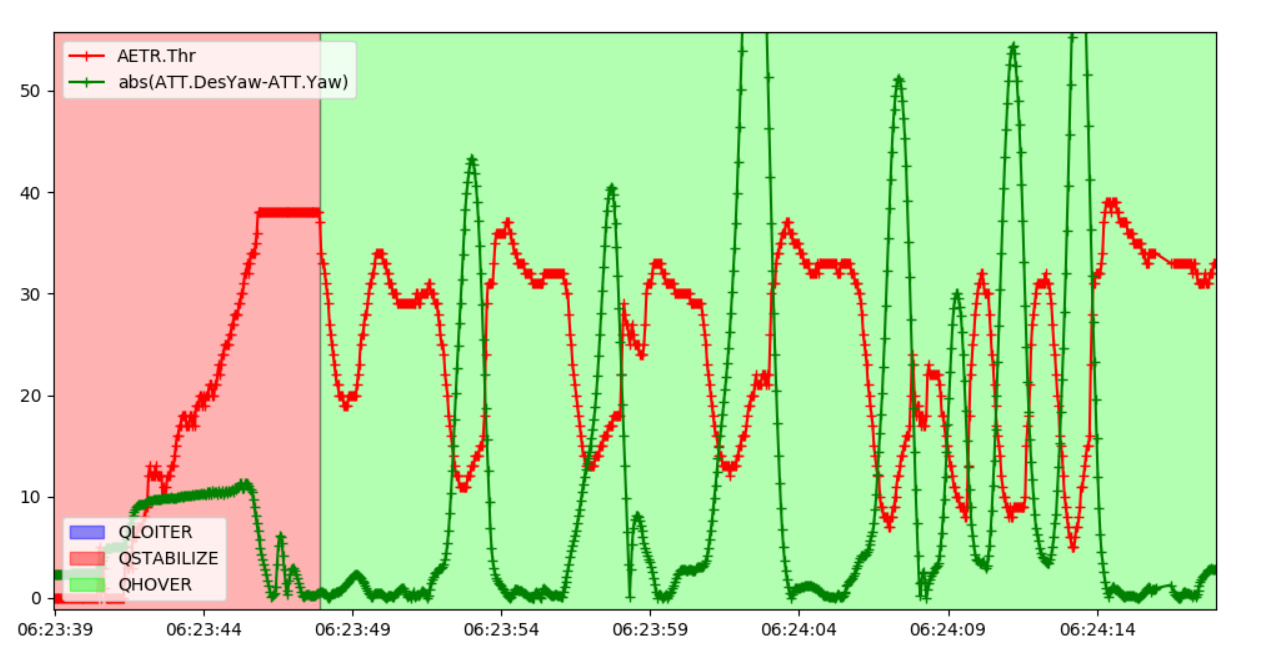
@lorbass I see that yaw error is directly correlated to low throttle, so whenever the vehicle is climbing in qhover and throttle is automatically reduced, you lose elevon authority and roll/yaw control. It will probably do better in qstabilize if you don’t back off the throtlle as you pitch forward.
But then you’ll definitely need Q_TAILSIT_GSCMSK = 2 since you’ll pick up a lot of airspeed.
This plot is from the beginning of test 7 with the higher yaw P gain.
I estimated the prop sice of your copter-tailsitter not so large?
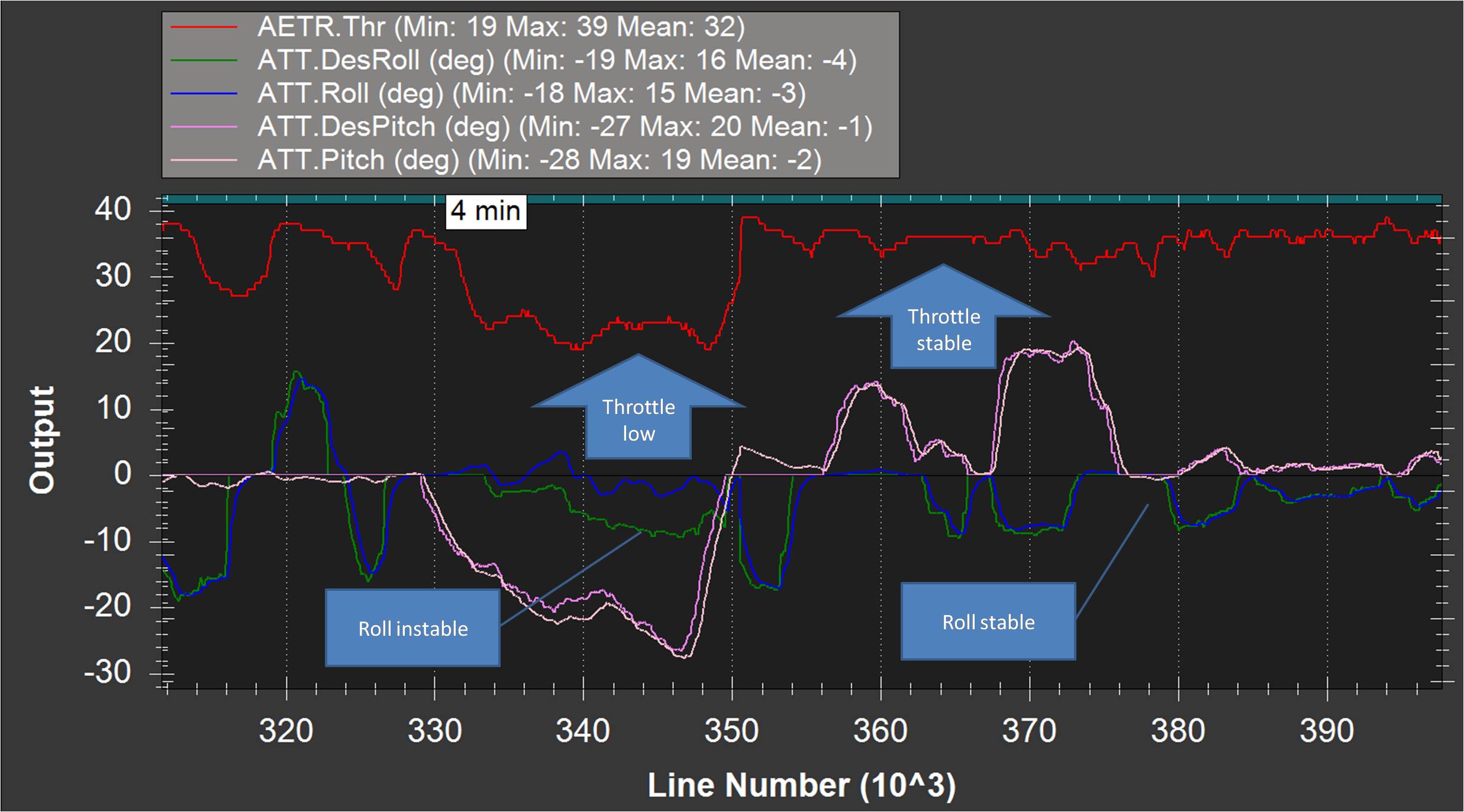
A verry interesting and clear confrontation. I never checked throttle but this throttle oscillation is also to hear.
When you overlay Pitch it is to see, that this low throttle with oscillation happens when Pitch down more than 10° but never with Pitch Up. May be due to the lift of the cord, even with this low speed.
And of course, with this low throttle neither torque nor elevon control is verry effectiv.
But where comes this throttle oscillation? Is this a result of Yaw/Roll oscillations or inverse?
I used QHOVER to hold easier the altitude due to spring loaded Throttle stick at 50%.
I guess you mean with the second GSCMSK = .4 >> GSCMIN?
What is meant with Low throttle oscillation THSCMX ?
Will do the next test with BSCMSK = 2.
@lorbass, Right. That was a typo. I’ve corrected it to:
There may be nothing we can do to make this airframe stable at high alpha with low throttle and low airspeed, but that would not be surprising. Perhaps we could improve the qhover controller to avoid this situation, though that would probably be similar to automatically switching to qstabilize and giving up on altitude control.
As a vectored Tailsitter it was verry stable in QHover. I didn’t continue, because with the 10" Props it consumed in Plane Mode the same current as in QHover. And surprising with Pitch 35° the Thrust doesn not drop so much as a copter Tailsitter. https://www.youtube.com/watch?v=niCgUSXYS_g
For this Frame, I will test with GSCMSK=2, and also how it react in QSTABILIZE.
Thanks for the offer to improve the controller, but after above tests without succes I will continue with the old-fashioned Skywalker 6 as vectored Tailsitter.
Fighting for a long time with succes was withstand, without sccess obdurateness 
Hey, what’s the thrust to weight ratio on your aircraft? If it’s high T/W, you can increase battery size to increase weight which in turn keeps higher mass flow over the wing.
Had tried this on Dual motor fixed motor setup. It had worked well for me.
T/W Ratio is 2.1:1 according https://www.ecalc.ch.
It hovers at 35 to 38 % Trust.
Yes may be the Ratio is wrong, a good Idea. Thanks for the hint.
This would be the first time I need more weigth
Will try it first with a piece of lead.
According ecalc T/W with
100 gr = 1.9 : 1
200 gr = 1.8 : 1
300 gr = 1.6 : 1
1 Like
Great succes, this solved the problem. I added a copper bar of 125 gr at the CG and the thrust is good engoughe to stabilize the wing in 30° forward hovering. But it is still a littly slugish when the upper mot goes near to zero.
I wonder what happend when I increase the Q_ANGLE_MAX. (Speed, Instability?)
Instead of the copper Payload, I could use a 5000 mAh Battery, now 3000 mAh
I could not test yet GSCMSK = 2, because the battery of the tablet was empty. ![]()

Log: https://drive.google.com/open?id=1wHj99jiUX5GyhHJ78mdz1UhAmUI3132B
Param: https://drive.google.com/open?id=1PI99k8rUkeUESQgQEcYBBpznN8f8WZCY
1 Like
Great news! I really like the motor% display with the green bars.
I assume the upper right graphic is your roll/pitch control input and upper left is AETR.Ail and Thr.
What is the grey circle at bottom center?
It seems that your left elevon is often deflected more than the right one. Could this be a mechanical trim issue?
And do you have any advice for synchronizing the video with the log data? It’s been a long time since I used Dashware, and I remember being unsure how accurately I was able to match the video to the log.
Hi Mark, yes I’m happy.
Left up is RCIN 3 and 4 Throttle/Yaw, rigth up RCIN 1 and 2 (Roll/Pitch)
The grey circle is a test to show the Motor Thrust result, a combination of RCOU 1 to 4.
Will have a look at the Elevon Trim and calculation in Dashware for the display. Perhaps also due to the wind from left and my corrections.
I synchronize it with the noise of the starting mots heared in the video and the increasing current in Dashware from the log.
I made a trial with the command with a channel RCxx Option “lost Plane sound”. This could be heared in the video and displayed in Dashware as RCIN. But my Beeper is not loud enoughe and with Pixracer I’ve no spare output for a LED.
Edit The calculation of the Neutral Position of the elevon right was wrong from earlier versions.
I guess the unequal elevon deflection is simply the sum of elevator + aileron inputs, and doesn’t indicate anything wrong. I’ll just look at AETR in the log to be sure.
And I’ll think about aids for syncing the video; possibly another good application for a LUA script!
Do you mean for Taranis?
I use a Skydroid T10. It has a light weight FPV but a poor TX.