A huge step forward. I seems that we could win
I installed RF8 on a other PC with Win 7 Home Premium, Ping works as described and I saw the often desired: Connected. In the Ubuntu is the feedback line per line to see when I move the mode switch.
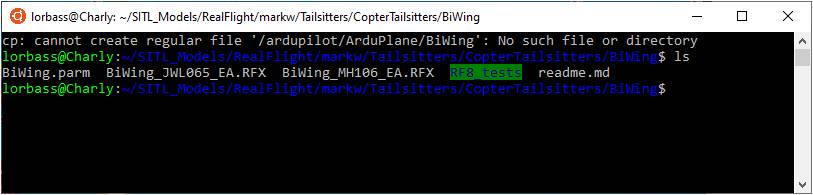
But the BiWing can’t be loaded in RF8 and therefore not be selected.
2 messages: file … succesful imported ( in green color)
…can’t be imported does not based on a nonexistent model. (in red color)
The same message with another model: SkyCat…
On the other PC it was possible.
2 more questions:
how to see MissionPlanner?
how to import the params into a directory of Ubuntu?
Great! That is very encouraging.
In RealFlight, you have the option to export either a “variant” or “entire model”, and the one you’re trying to import must be a variant of a model you haven’t yet imported.
The “BiWing_JWL065_EA.RFX” here:
should be a complete model and the file “BiWing.parm” are the parameters to use.
The readme file there has a partial description of the models and parameters.
You can download the RFX files using a web browser by clicking on them individually, then pressing the download button. The parameters file can be opened directly in a web browser and copy/pasted. You can also download the entire repository by going here: https://github.com/ArduPilot/SITL_Models and clicking the green “clone or download” button.
I don’t use MissionPlanner with SITL, but I think it might connect automatically if you start it up after getting SITL going.
Yes, it sits on the green grass.
I’v marked the 1300 lines of params, and then copy paste into the editor. Safed as BiWing.param.
I think there is a better way? Will try next time the clone way.
Now, how put I this file into Ubuntu?
When you type that command in your home directory, it will create a clone of the repository at ~/SITL_Models. (where ~ represents your home directory)
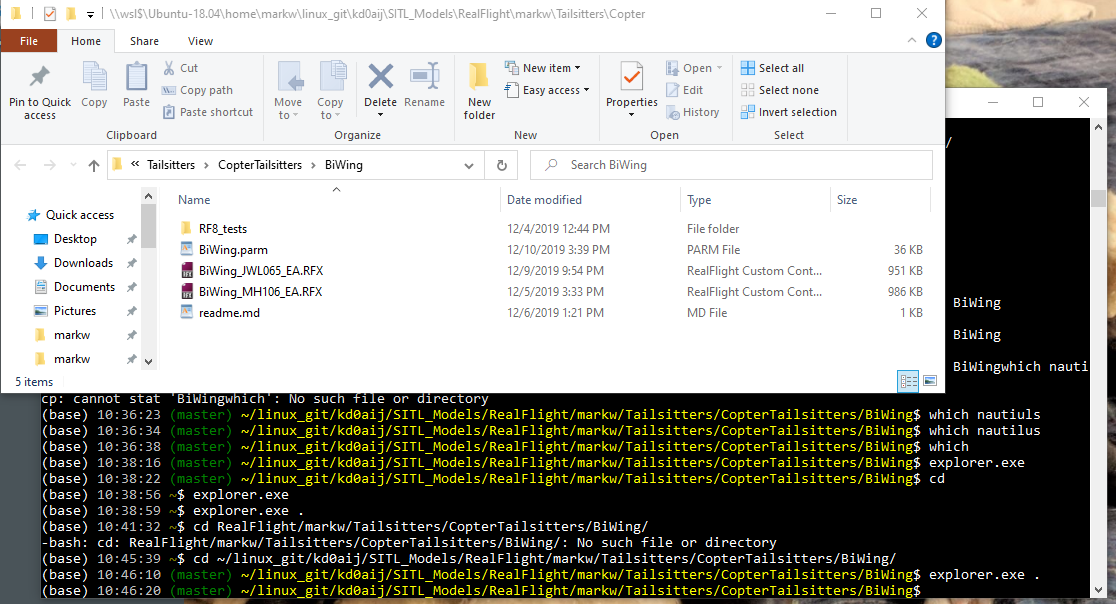
Once that is done, you will find the BiWing files at
~/SITL_Models/RealFlight/markw/Tailsitters/CopterTailsitters/BiWing/
and you can copy the parameter file to your ArduPlane/BiWing directory for convenience in loading the parameters.
At the mavproxy prompt after you start SITL, you can then type
param load BiWing.parm
reboot
to load the parameter file and reboot. You will probably have to ctrl-C (kill) the mavproxy/SITL window and restart before the parameters will be properly loaded.
To check whether the parameter load has worked properly, type
param show q*
If you see lots of parameters starting with “Q_”, you should be ready to fly. If not, type ctrl-c to shut SITL down, then start it up again. Repeat the “param load” command and “reboot” then recheck to see if you have all the Q_ parameters loaded.
If that doesn’t work, we’ll complain to @peterbarker
Looks like you just forgot the “~/” at the front of the path.
auto-completion is useful for this sort of thing; in that directory try typing
cp Bi<tab><tab>
where <tab> represents the tab key
The first tab auto-completes until there are multiple possibilities, and the second display the filenames that match. You could then type in some more of the filename and tab again to finish the auto-completion.
Every thing works (a lot of Q Params), in the air it Rolls in QHover (3pos switch up) immediatly by 180° and crashes.
Other positions the same in another direction. Motors react on left stick, rudder with right stick.
Arming and disarming OK.
But at least 1 second in the air after hard working at two persons.
SITL should be compiling the master branch by default, and it doesn’t yet support the biwing’s quad-X frame properly. But it should be stable in qhover and qstabilize, so there may be something else wrong.
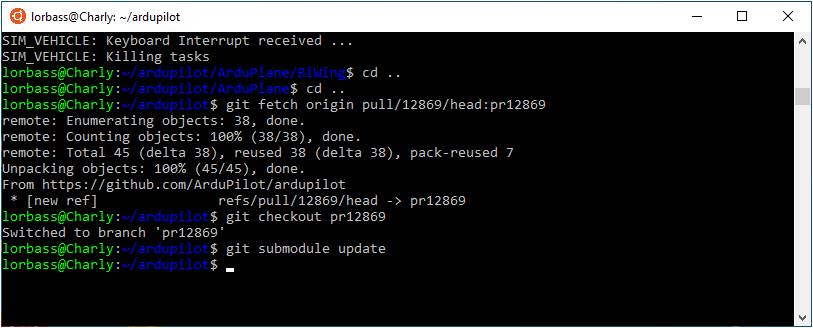
Let’s try using the branch that @losawing has been flight testing, since you’ll need that anyway to validate the BiWing model.
To get that branch, you’ll need to type a few commands in the ardupilot directory.
That looks good. Try starting up RF8 then running SITL again.
You shouldn’t have to reload parameters since they are saved as eeprom.bin in the ArduPlane/BiWing directory.
Yes, i flies, yaw and roll are reversed/switched
(Left stick is roll, right stick yaw.
Throttle back, it does nearly not sink.
Transmitter set to mode 2.
How do I modify the params? (Edit BiWing.parm and restart or direct in the Ubuntu console)
Congratulation !!
you probably have q_tailsit_input=3. The rudder stick control body frame yaw and roll stick control body frame roll like an normal airplane.
Input=0 or 1 are definitively obsolete as they generate rates limitation, just forgot them.
input=2 gives a multicopter feeling but at high lean angle you may get confuse.
q_acro is only mode 3.
For these reasons mode 3 in my favorite.
I have already ordered RF9. Should be in my mail box tomorrow. I will test my masochist skill… On the other hand, since two years I think I have crashed planes in the water around 10 times and this is also a real pain to remove all the electronic.
Thats amazing. I thougt my experiences have deterred you.
In the Wiki Using SITL with RealFlight — Dev documentation
is a easy method to use it. Can you report if it works on your system. Because in the manual of RF9 is in “Settings —<Physics” no FlightAxis to enable.
That would annoy me after making a detour through all the Dev tools.
Enabling RealFlight Link Feature
On RealFlight 9 go to Settings->Physics and enable the FlightAxis option then restart RealFlight.
Configure RealFlight
Start RealFlight (it should look exactly like regular RealFlight, there is no way to visually determine the difference)
Select Simulation, Import, RealFlight Archive (RFX, G3X) and select the file QuadcopterX downloaded above. A message, “…was successfully imported” should be displayed
Select Aircraft, Select Aircraft, open “Custom Aircraft” section and select “Quadcopter X - direct throttle”. In the current state, the RC inputs come straight from the stick so it is not flyable.
@hwurzburg very nice video, thanks.
At the early beginning of the tailsitter development, more than 2 years ago, pitch stability was the main issue. With vectored motors and now copter tailsitter, pitch (and roll) are very strong and now the yaw stability is the main weakness. However you can mitigate this weakness by increasing size and throw of control surfaces and mount your motors closer to wings tip.