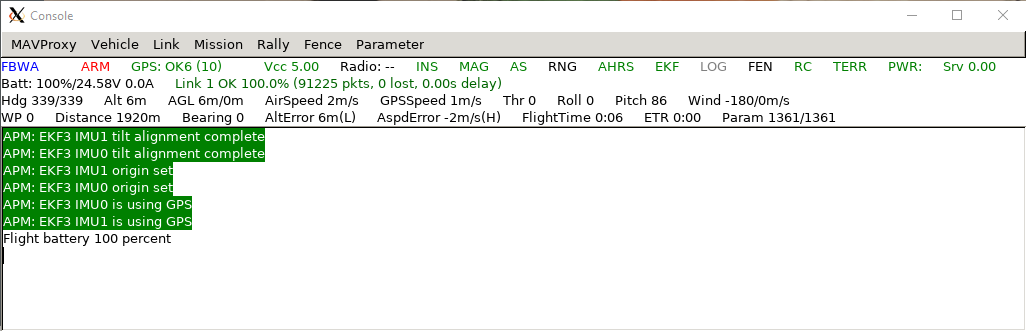
Every thing works (a lot of Q Params), in the air it Rolls in QHover (3pos switch up) immediatly by 180° and crashes.
Other positions the same in another direction. Motors react on left stick, rudder with right stick.
Arming and disarming OK.
But at least 1 second in the air after hard working at two persons.
SITL should be compiling the master branch by default, and it doesn’t yet support the biwing’s quad-X frame properly. But it should be stable in qhover and qstabilize, so there may be something else wrong.
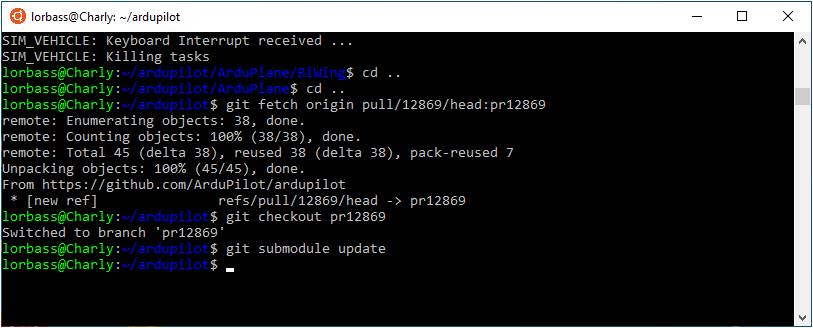
Let’s try using the branch that @losawing has been flight testing, since you’ll need that anyway to validate the BiWing model.
To get that branch, you’ll need to type a few commands in the ardupilot directory.
That looks good. Try starting up RF8 then running SITL again.
You shouldn’t have to reload parameters since they are saved as eeprom.bin in the ArduPlane/BiWing directory.
Yes, i flies, yaw and roll are reversed/switched
(Left stick is roll, right stick yaw.
Throttle back, it does nearly not sink.
Transmitter set to mode 2.
How do I modify the params? (Edit BiWing.parm and restart or direct in the Ubuntu console)
Congratulation !!
you probably have q_tailsit_input=3. The rudder stick control body frame yaw and roll stick control body frame roll like an normal airplane.
Input=0 or 1 are definitively obsolete as they generate rates limitation, just forgot them.
input=2 gives a multicopter feeling but at high lean angle you may get confuse.
q_acro is only mode 3.
For these reasons mode 3 in my favorite.
I have already ordered RF9. Should be in my mail box tomorrow. I will test my masochist skill… On the other hand, since two years I think I have crashed planes in the water around 10 times and this is also a real pain to remove all the electronic.
Thats amazing. I thougt my experiences have deterred you.
In the Wiki Using SITL with RealFlight — Dev documentation
is a easy method to use it. Can you report if it works on your system. Because in the manual of RF9 is in “Settings —<Physics” no FlightAxis to enable.
That would annoy me after making a detour through all the Dev tools.
Enabling RealFlight Link Feature
On RealFlight 9 go to Settings->Physics and enable the FlightAxis option then restart RealFlight.
Configure RealFlight
Start RealFlight (it should look exactly like regular RealFlight, there is no way to visually determine the difference)
Select Simulation, Import, RealFlight Archive (RFX, G3X) and select the file QuadcopterX downloaded above. A message, “…was successfully imported” should be displayed
Select Aircraft, Select Aircraft, open “Custom Aircraft” section and select “Quadcopter X - direct throttle”. In the current state, the RC inputs come straight from the stick so it is not flyable.
@hwurzburg very nice video, thanks.
At the early beginning of the tailsitter development, more than 2 years ago, pitch stability was the main issue. With vectored motors and now copter tailsitter, pitch (and roll) are very strong and now the yaw stability is the main weakness. However you can mitigate this weakness by increasing size and throw of control surfaces and mount your motors closer to wings tip.
@kd0aij Mark, on a different topic…I am trying to understand Tailsitter transitions…
in normal quadplane going from vtol to fw, the forward motor is turned on (full blast…talked to tridge about limiting that to takeoff max), after min airspeed reached the vtol motors shut down over Q_TRANSISTION_MS and AHRS immediately switched to fw trims, conversely, fw->vtol, shuts off forward motor and decells to min airspeed via calculated decel time while VTOL motors are on and stablilizing at throttle stick input level and control surfaces are maintaining FBWA like stabilization, after decel param calculated time transition is completed and AHRS trim shifted to vtol values (I think it happens then, maybe before…not sure)…
it seems in Tailsitters it seems for transition to fw: the pitch slews toward the transition pitch (-45deg VTOL frame by default) with VTOL motors ignoring pitch stick input and once reached, instantly transitions to fw and fw AHRS…conversely it transitions back to VTOL by immediately shifting to VTOL throttle scaling for forward motors, and VTOL AHRS so that control surfaces are trying to pitch up slightly , coasting until decel time calculated elaspsed and turns on VTOL only motors finishing transition …my question is what controls the slew time to the transition angle in VTOL->FW transition? it does not seem to be related to Q_TRANSITION_MS…mine is 5sec, and it happens in 2sec…
also, please correct anything in my understanding above…thanks
After your poste, I tried the simple connection on the PC where I had succes with the connection. MP and RF8 on the same PC:
And unbelievable, it works. Even without enabling in RF8 Setup > Physics.
The copter as described in the Wiki flies.
I needed to set the param in Config, Full parameter list, Arming to 0.
But not the BiWing, the mots are not working, the elevons work, the Modes are manual, FBWA and RTL. In MP Config Params I loaded the BiWing.param but nothing better.
I think @iampete knows how to use MP with SITL.
I don’t know what version of ArduPilot it uses (certainly not a PR branch), or where it gets parameters from.