That’s looking pretty good; it built ardupilot successfully and appears to be running both ArduPlane and mavproxy.
Did RealFlight display the message “FlightAxis Controller Device has been activated”?
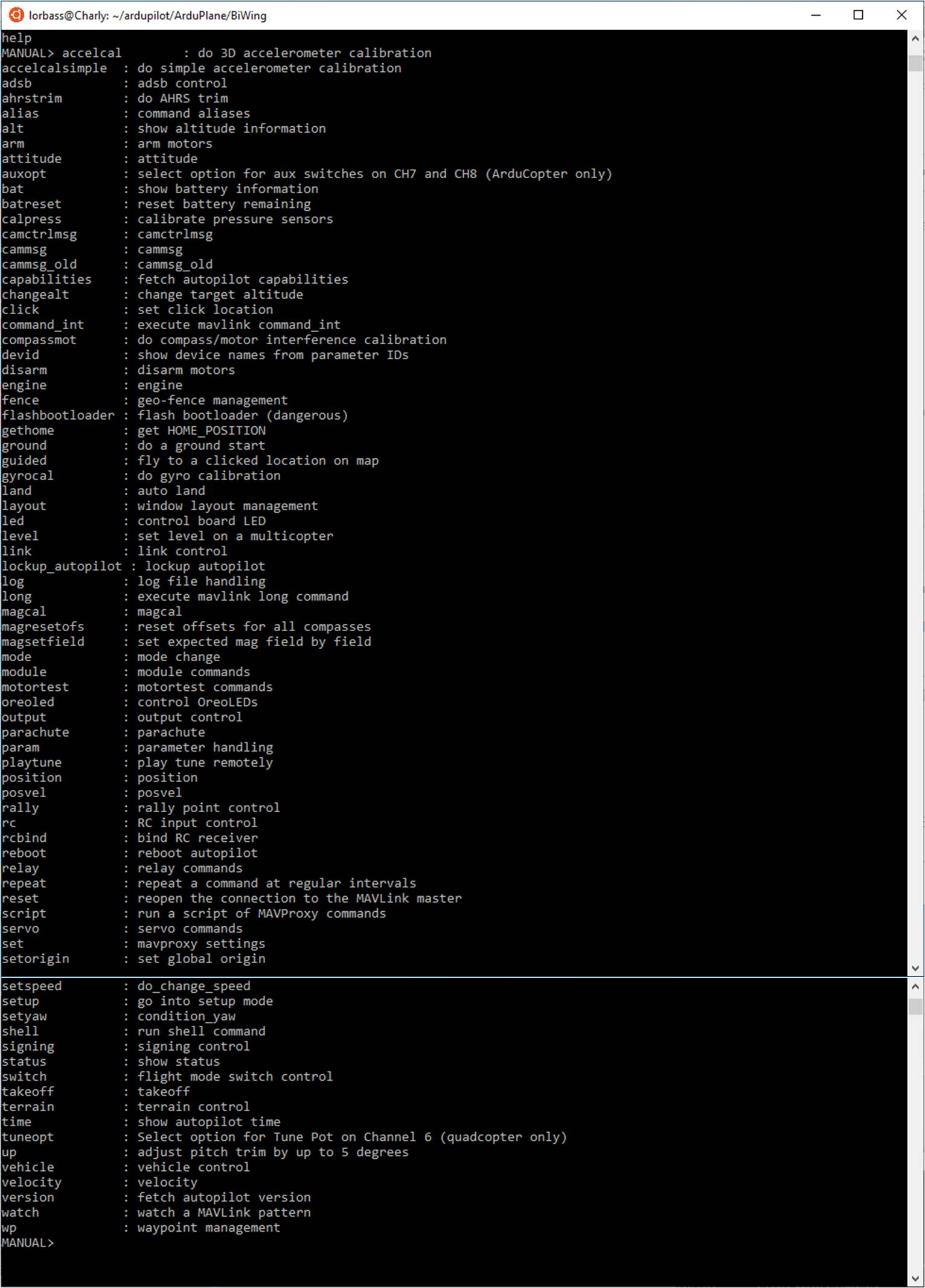
The reason ls and cd don’t work is that’s the mavproxy console, a command line GCS for issuing commands like “param load …” and “mode qhover”. Type “help” to see what commands are available there. Documentation is here: http://ardupilot.github.io/MAVProxy/html/index.html
I’m comparing your console output to mine to see if there are any significant differences.
So you installed WSL on a Windows 10 machine, and RF8 is running on another computer under Windows 7.
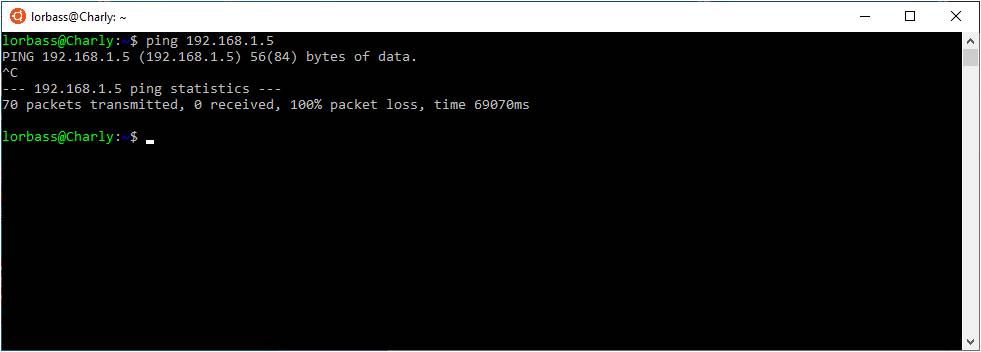
If you can ping 192.168.1.5 from Ubuntu, SITL should connect to Realflight when you start it up.
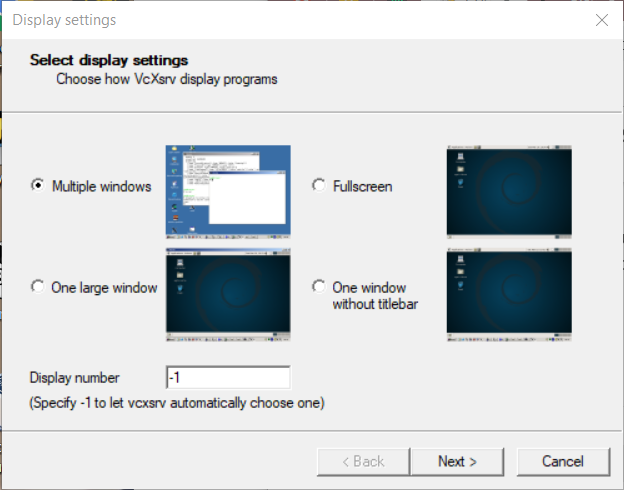
I think I found the issue. I forgot that I had to install an Xserver for Windows:
This server needs to be running so that ArduPlane can display its console.
I start it up using the “Multiple windows” option:
and “no client” on the next screen, before running SITL. The reason I forgot it is that I added it to my Windows startup apps so that it starts when I log in to windows.
Installed VcXsrf and started as shown above, see it running in the Task-Manager.
But the same Warning: no config for frame (flightaxis:192.168.1.5) and stop a the same log Line. APM: EKF2…
And no infos in RF8, left, down.
(base) 07:03:56 (pr-gsc-base) ~/linux_git/kd0aij/ardupilot/ArduPlane/Stryker_quad$ ping 192.168.0.100
PING 192.168.0.100 (192.168.0.100) 56(84) bytes of data.
64 bytes from 192.168.0.100: icmp_seq=1 ttl=128 time=0.328 ms
64 bytes from 192.168.0.100: icmp_seq=2 ttl=128 time=0.216 ms
64 bytes from 192.168.0.100: icmp_seq=3 ttl=128 time=0.243 ms
64 bytes from 192.168.0.100: icmp_seq=4 ttl=128 time=0.238 ms
^C
--- 192.168.0.100 ping statistics ---
4 packets transmitted, 4 received, 0% packet loss, time 3002ms
rtt min/avg/max/mdev = 0.198/0.213/0.240/0.023 ms
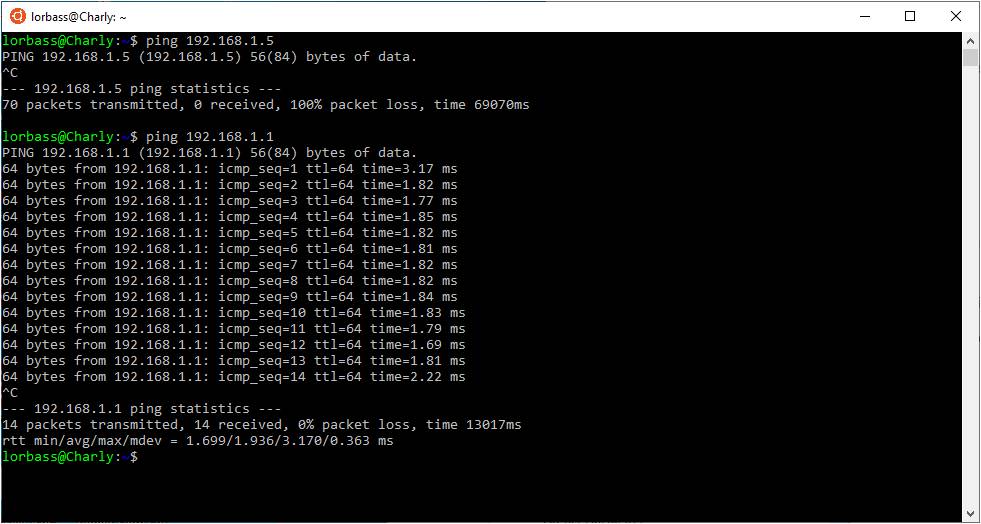
It transmits packets about once per second, until you type ctrl-c to stop it.
If there is no connectivity to the URL you are pinging, you won’t see any of the “64 bytes from …” printouts.
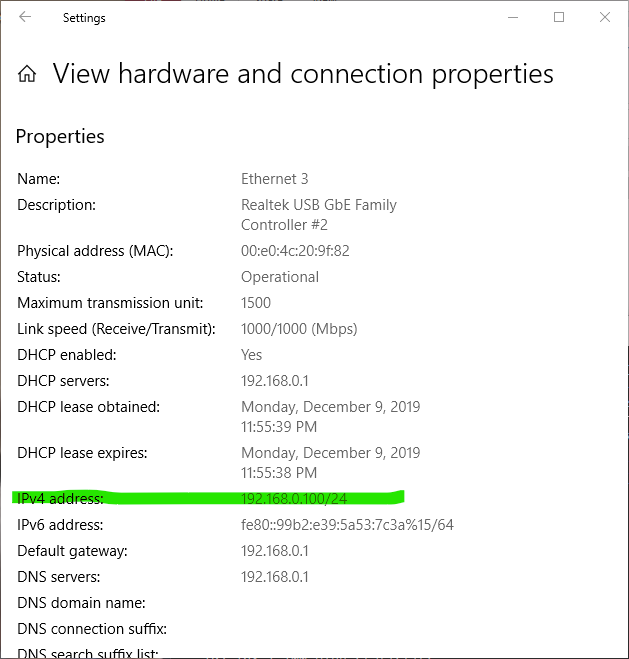
Yes, that means there’s something wrong with the network. Either 192.168.1.5 is the wrong address, or something is configured wrong. On the machine running RealFlight, check that the IP address is correct. On my machine it looks like this:
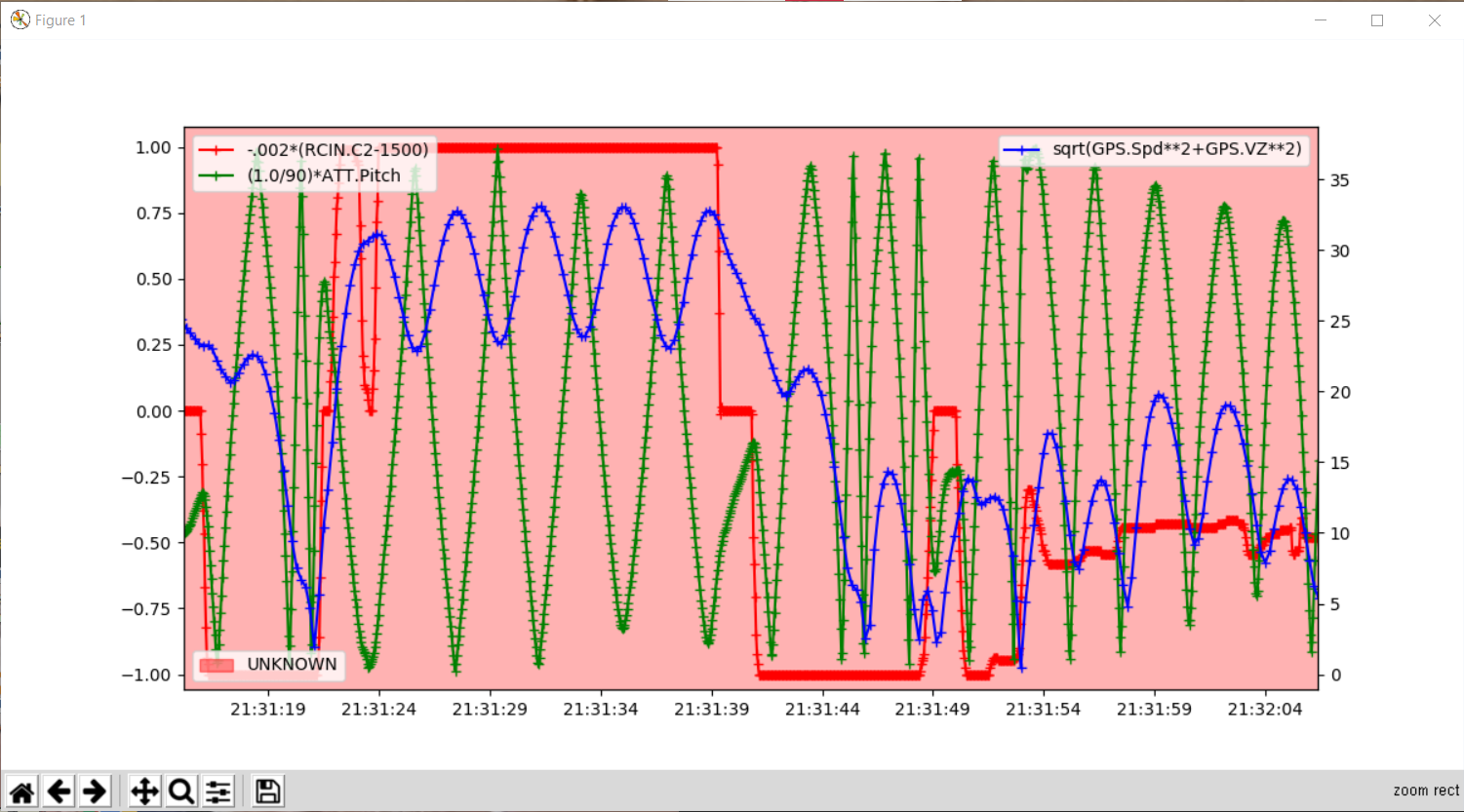
@losawing@lorbass This is a plot from a SITL run with the BiWing JWL-065 airfoil and 2.5 degree top wing incidence. The red line is elevator (+1 up to -1 down), the green line is pitch (+1 is nose vertical, -1 is nose down) and the blue line is the magnitude of GPS speed (airspeed is zero in the log for some reason).
Note that the airspeed drops significantly when doing outside loops:
But yes, there is something strange with the Net access.
Via the explorer, I can access all directories and files from both sides.
When I want to safe files from BlackPC (RF8) to Charly (SITL) I can’t see all directories.
Something bad configured with the “homeNet” which seems not to exist on Win 10.
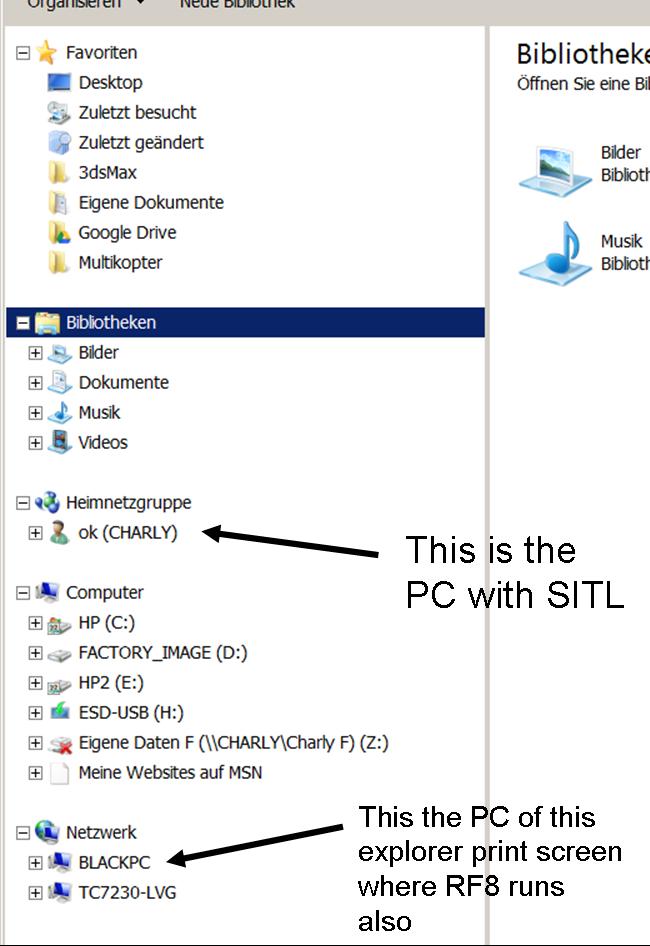
Here the explorer view of RF8 side.
I deleted the home Network and now both PC’s are listet under Network.
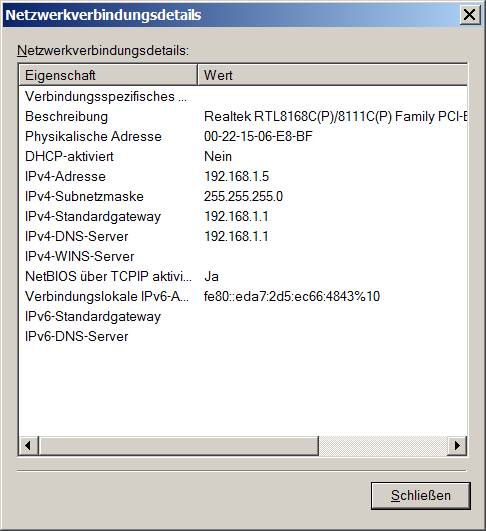
And I tested ping with the ip adresse 192.168.1.5 as indicated in the print out of the Win7 PC and again, no 64 bytes from listed.
Could it be a setting in your router? I don’t know much about network configuration on Windows or Linux, and I don’t recall having to do anything special when I was using two machines connected to the same switch.
Airspeed ang gps speed look very normal. Airspeed is low around 45 ° right before outside loop end.
From the pilot point of view, the plane behavior is exactly the one of an acro plane, no lag, no limitation. Just the trajectory is much much easier to keep as gyros take care of roll and yaw.
I would say clean acro is so easy !!!
A huge step forward. I seems that we could win
I installed RF8 on a other PC with Win 7 Home Premium, Ping works as described and I saw the often desired: Connected. In the Ubuntu is the feedback line per line to see when I move the mode switch.
But the BiWing can’t be loaded in RF8 and therefore not be selected.
2 messages: file … succesful imported ( in green color)
…can’t be imported does not based on a nonexistent model. (in red color)
The same message with another model: SkyCat…
On the other PC it was possible.
2 more questions:
how to see MissionPlanner?
how to import the params into a directory of Ubuntu?
Great! That is very encouraging.
In RealFlight, you have the option to export either a “variant” or “entire model”, and the one you’re trying to import must be a variant of a model you haven’t yet imported.
The “BiWing_JWL065_EA.RFX” here:
should be a complete model and the file “BiWing.parm” are the parameters to use.
The readme file there has a partial description of the models and parameters.
You can download the RFX files using a web browser by clicking on them individually, then pressing the download button. The parameters file can be opened directly in a web browser and copy/pasted. You can also download the entire repository by going here: https://github.com/ArduPilot/SITL_Models and clicking the green “clone or download” button.
I don’t use MissionPlanner with SITL, but I think it might connect automatically if you start it up after getting SITL going.
Yes, it sits on the green grass.
I’v marked the 1300 lines of params, and then copy paste into the editor. Safed as BiWing.param.
I think there is a better way? Will try next time the clone way.
Now, how put I this file into Ubuntu?
When you type that command in your home directory, it will create a clone of the repository at ~/SITL_Models. (where ~ represents your home directory)
Once that is done, you will find the BiWing files at
~/SITL_Models/RealFlight/markw/Tailsitters/CopterTailsitters/BiWing/
and you can copy the parameter file to your ArduPlane/BiWing directory for convenience in loading the parameters.
At the mavproxy prompt after you start SITL, you can then type
param load BiWing.parm
reboot
to load the parameter file and reboot. You will probably have to ctrl-C (kill) the mavproxy/SITL window and restart before the parameters will be properly loaded.
To check whether the parameter load has worked properly, type
param show q*
If you see lots of parameters starting with “Q_”, you should be ready to fly. If not, type ctrl-c to shut SITL down, then start it up again. Repeat the “param load” command and “reboot” then recheck to see if you have all the Q_ parameters loaded.
If that doesn’t work, we’ll complain to @peterbarker