I am using T-motors, AIR40A ESC with MN4116 motors & 16" props.
This is really helpful analysis, It makes sense. But there is no weight shift in the drone, everything is hard tight and rigid.
Yes! that’s true, I had recently one case where motor 6 completely stopped during the flight so I guess it maybe the ESC problem.
But this circling issue can not be caused by the ESC because the FC is giving low signal to the ESC during circling.
Yes, wind will always be there but nominal not much, Arms are rigid, weight shift I will cross check again.
Sure! I will try this tomorrow morning and update you. I have been facing issues with the motor leveling, I currently use the bubble leveler for leveling, just want to know any industry standard setup is there which will be good for motor leveling? I just want to explore.
Do an ESC calibration before flight, and set those other params I recommended.
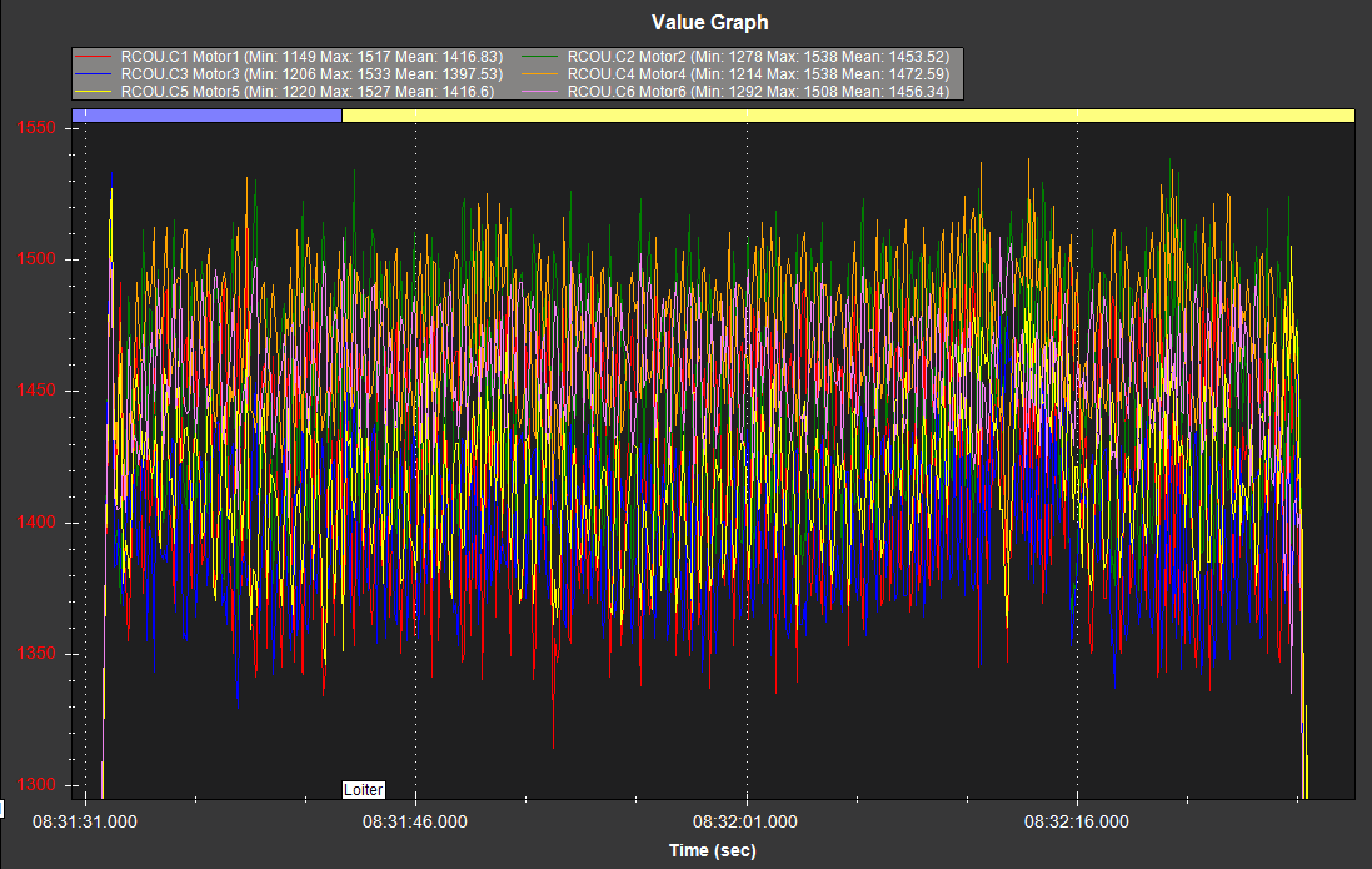
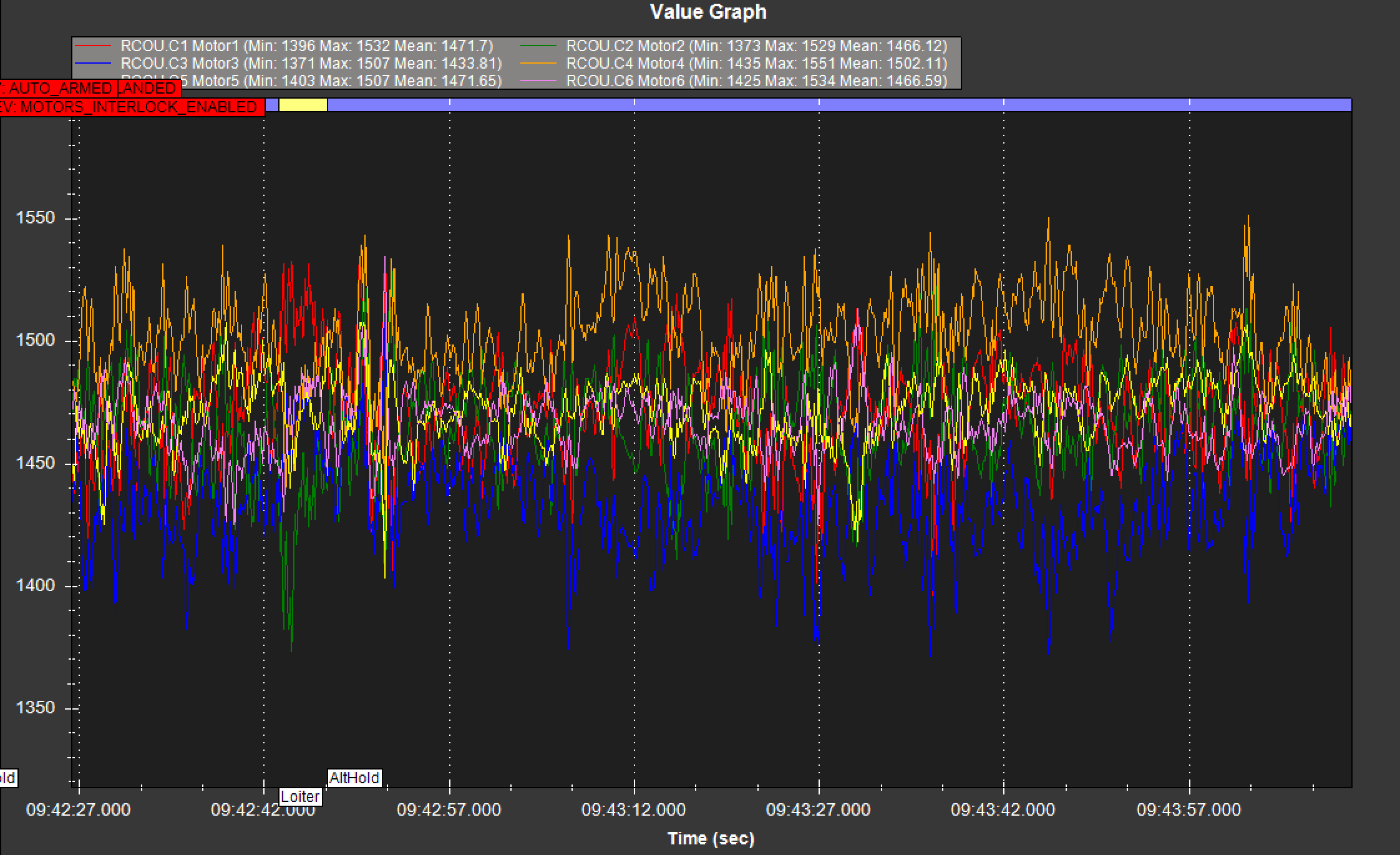
Usually if a motor is commanded to minimum you’d expect it to be about the only one producing good thrust, and the others or it’s opposite are producing nothing. The motor(s) commanded to maximum are the ones not working properly.
Hey @xfacta, I always do ESC calibration when I build or change any ESC in the drone. I do individual ESC calibration, like connecting it to the RC with Transmitter throttle up and the connecting the battery and pulling the throttle down (which is mentioned in Manual ESC-by-ESC Calibration).
I cross check the ESC calibration by doing the Motor test in Mission planner, if all motors run around the same throttle then it means ESCs are calibrated.
Is it the right approach? or do you recommend the Semi-Automatic ESC calibration approach?
No, dont connect the ESCs to the receiver!
The calibration is to align the clock of the ESC to the clock of the flight controller, which could be different to the receiver (in a manner of speaking).
Do the procedure I linked to - the flight controller will do the job for you.
These days it’s probably not so critical since the PWM from multiple devices is probably all close to being the same - but best to be correct and rule out any differences.
You probably need a good 60A ESC for those motors, the old 40A Air might be pushing the friendship. I would go with a 4in1 BLHELI32 or AM32 65A ESC. Centrally mounted and run long motor wires. Or you could use individual ESCs but keep the battery supply wires as short as possible and the motor wires long.
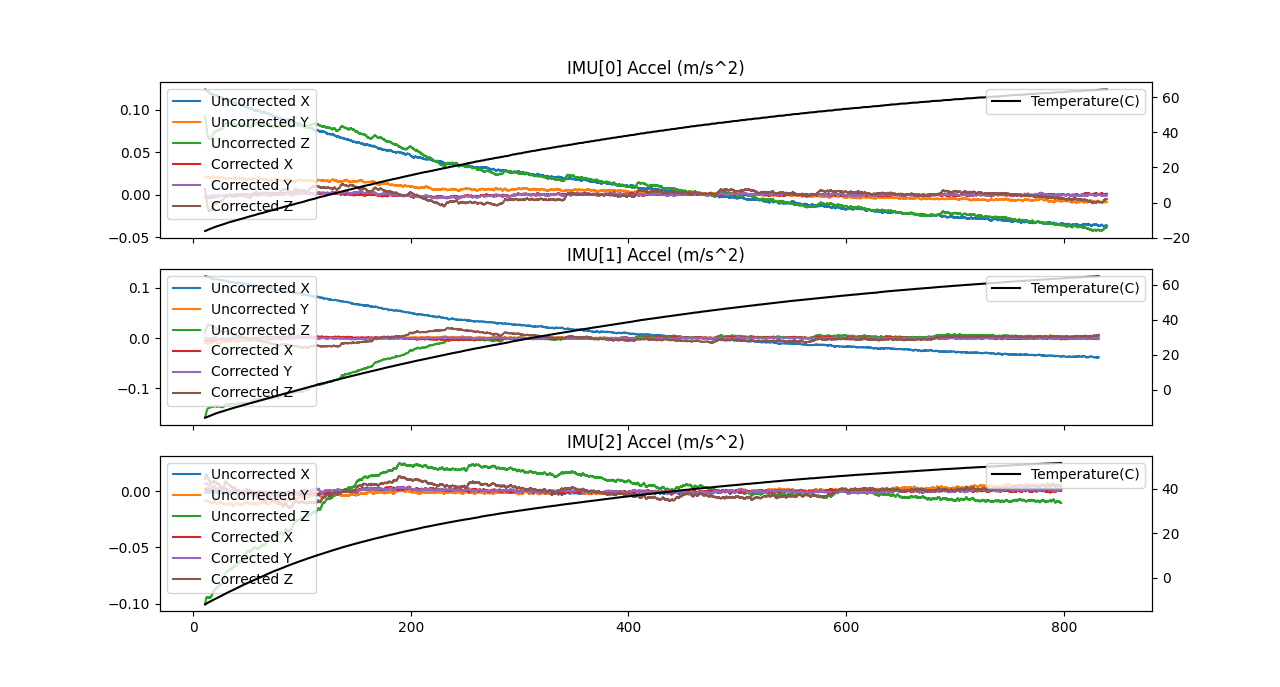
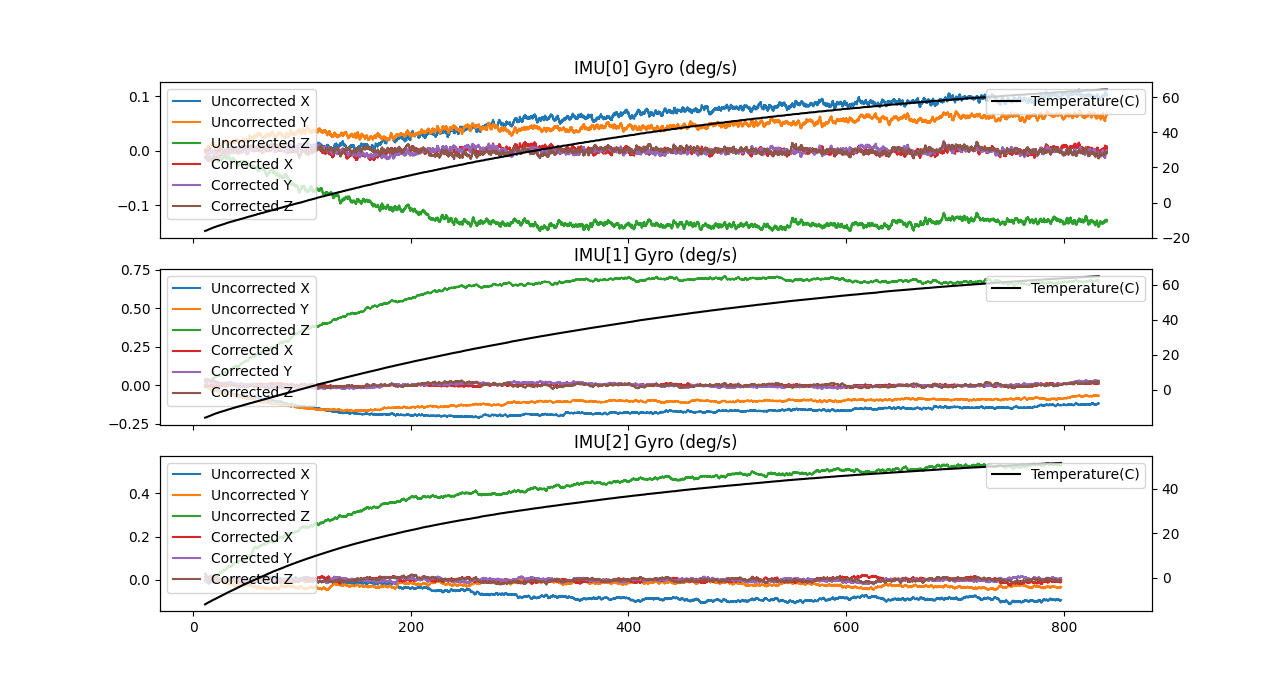
That temperature calibration is something that is so easy to do and has such a great benefit !
Dont worry about the noise until you’re ready to fly this copter again - I can check over the settings before-hand.
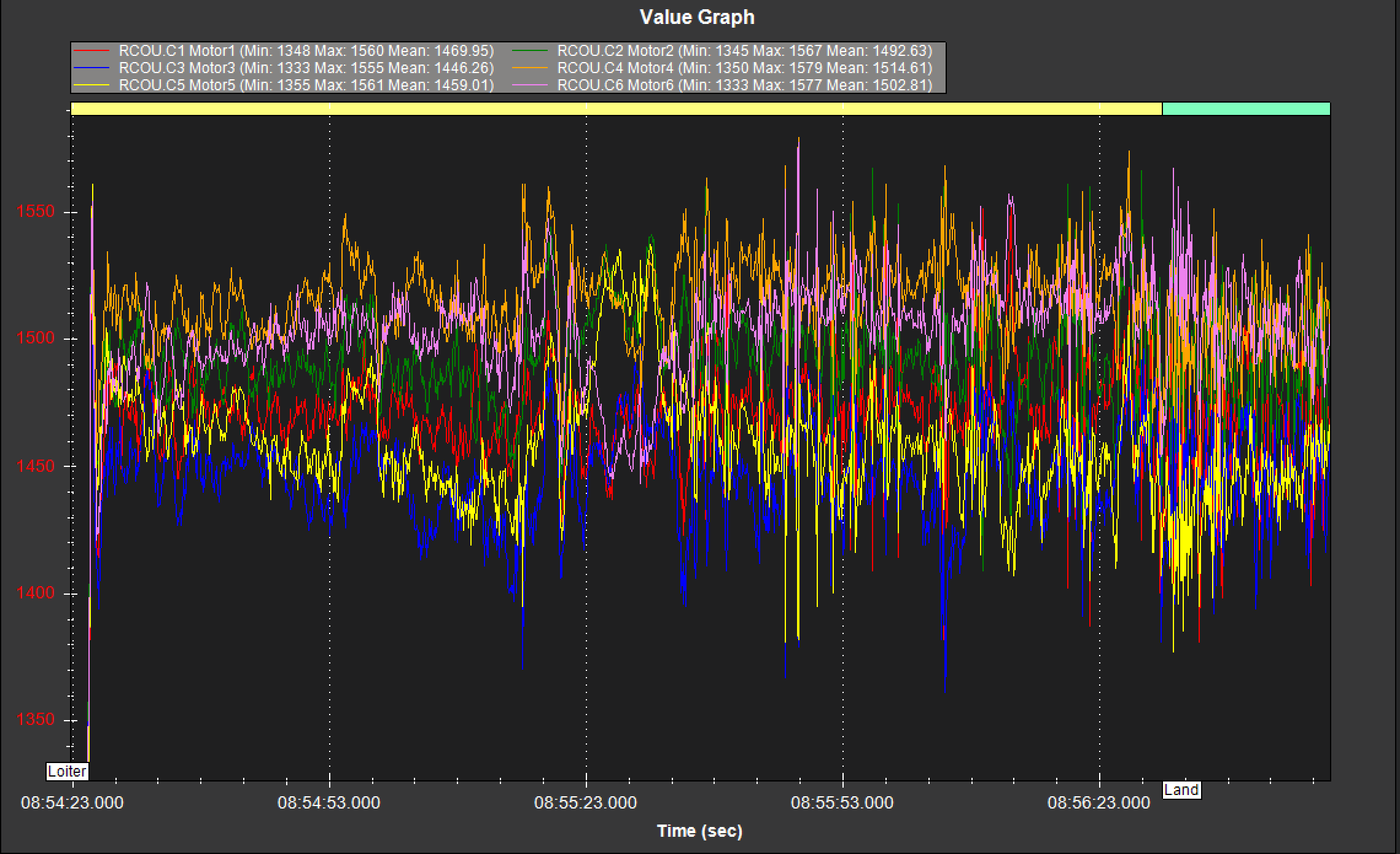
As the motors and roll rate are oscillating so reduced the followings:
ATC_RAT_RLL_P, I, D to 50% down
PSC_POSXY_P to 50% down and PSC_VELXY_P, I, & D to 50%.
There is around 2cm horizontal overlap in my drone (Hexacopter) center arm propeller and side arm propeller. The center arm motor is facing downward and the side arm motor is facing upward so there is around 9cm vertical gap between both the propellers.
So this overlap can cause the problem such as vibrations, stability issues, etc. I have seen that in the octacopter people are mounting one motor up and one motor down and both propellers will have 100% overlap but they still fly stable and smooth.
If the overlap is the cause of the vibration then what are your recommendation of using 2 propellers 16 inch (center arm) and other 4 propellers 17inch? I know center motors will run faster to maintain the same thrust ration but will it be any other issues in stability?
Really looking forward to some insightful recommendation and suggestions. Thanks!
Edit: @amilcarlucas Sir, It would be really good if I can get your comment on this and I am following your methodic configurator, it is really a wonderful tool I have few question regarding that. Shall I ask here in this topic or make a new topic?
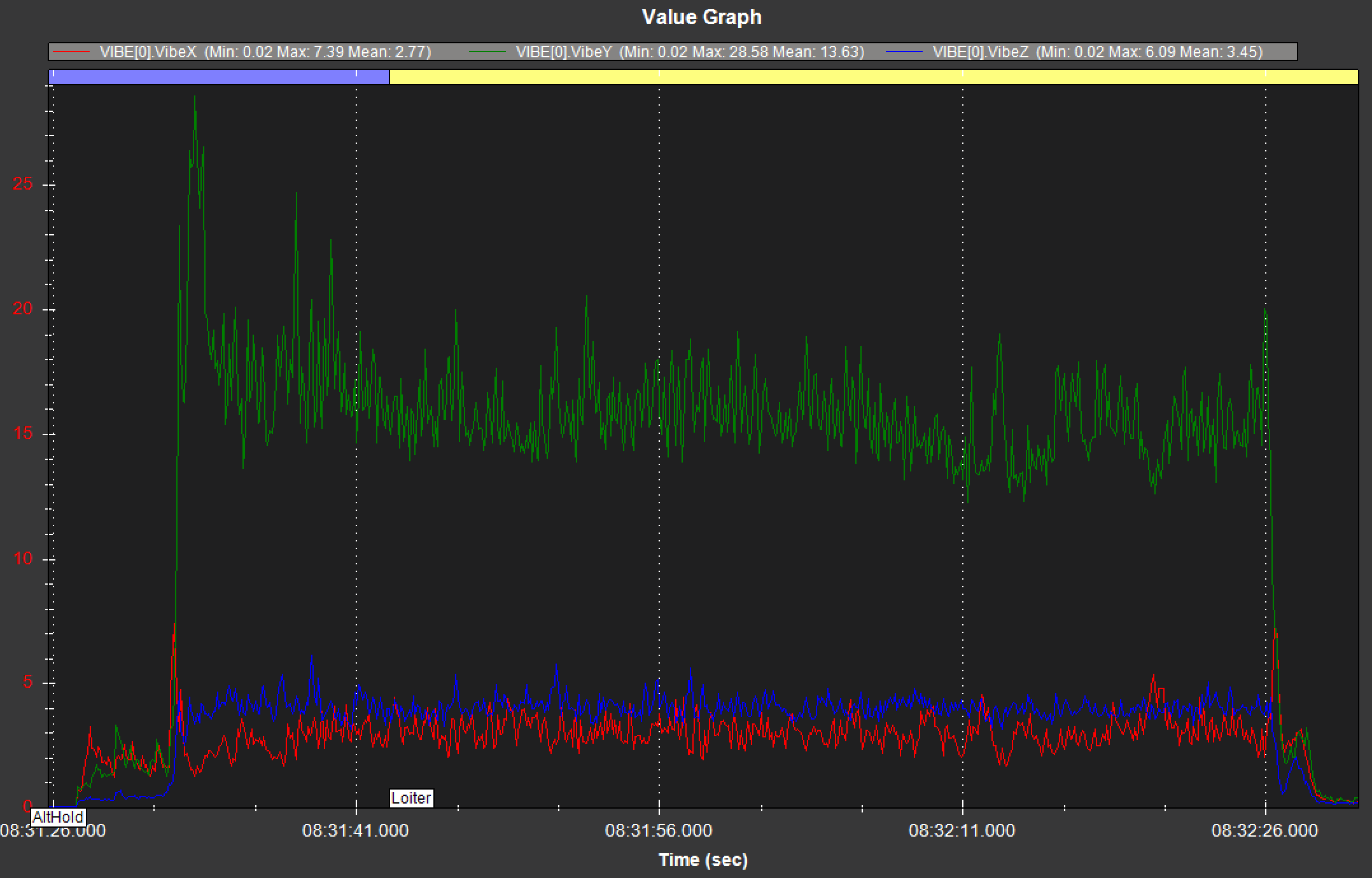
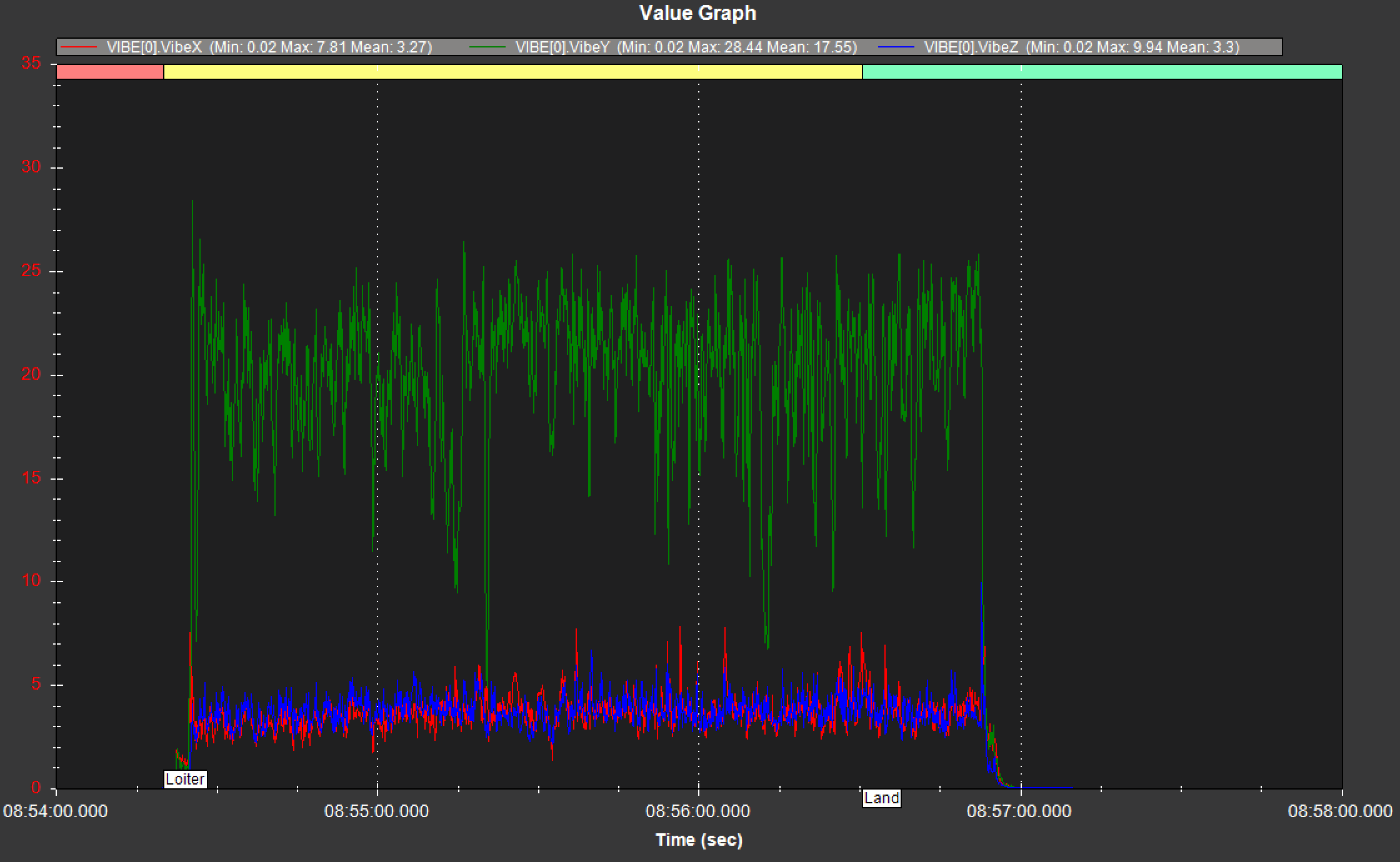
Y vibration are still under limit (less than 30) but I want to understand what are the factors which effects the Y vibration.
This is what I found on forum about the vibrations:
Vertical vibrations (Z) often means the track of the blades isn’t correct or equal.
Horizontal vibration (X & Y) can be blade balance or something hitting the FC during the flight.
Can anybody suggest me what else I can do to reduce the Y-axis vibrations? I have checked the propeller level and all wires fixed properly there is nothing moving in the drone. Here is the log: 2025-04-17 08-19-42.bin - Google Drive
Are these oscillations acceptable? There was a good wind when I was flying it and I have not done the tuning so that might be the reason of oscillations I guess.
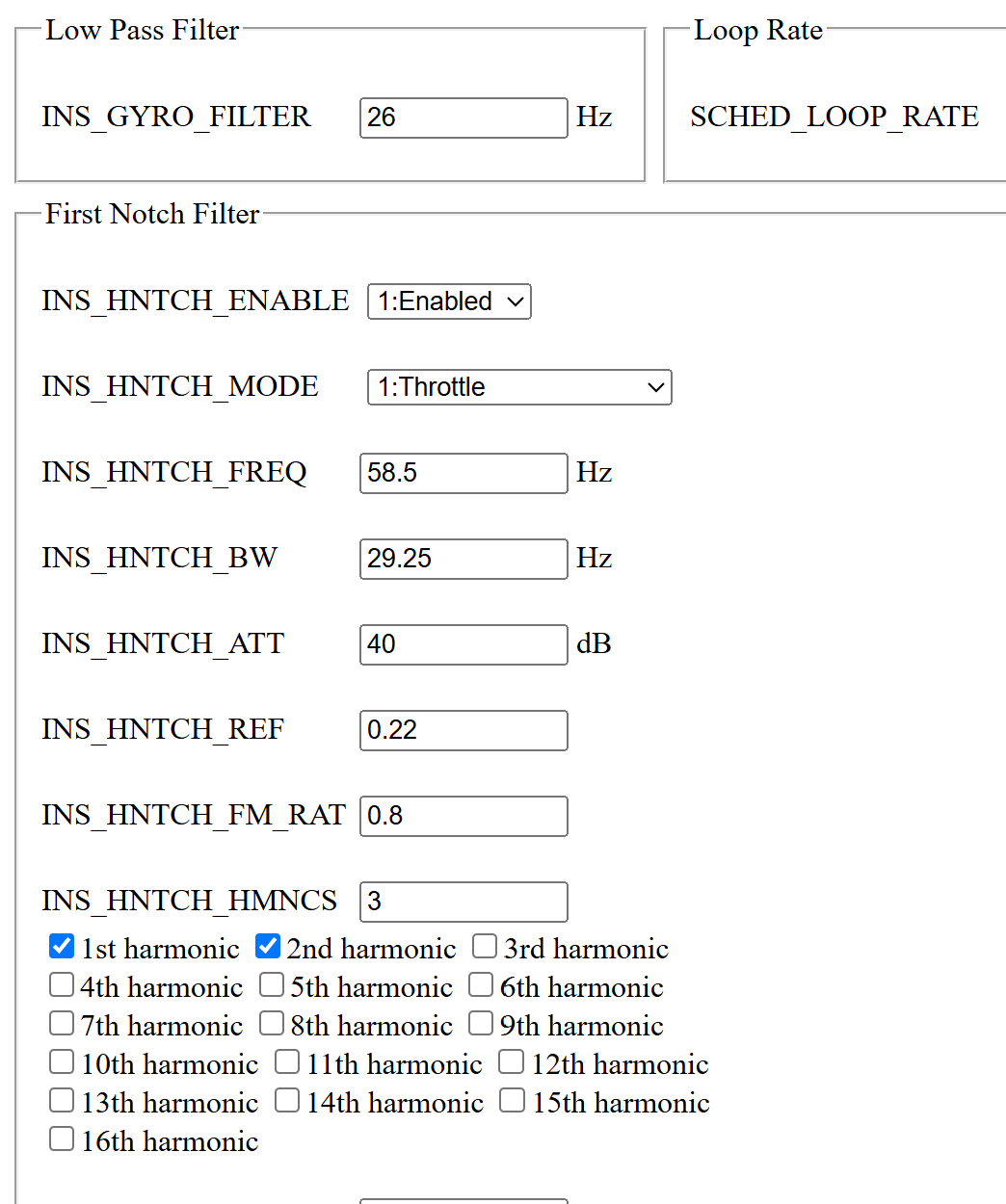
Have one doubt on Filter tools also:
So here I have taken the first peak value and then enabling the notch filter
I can change these values here (in the below screeshot) and then again recalculate the post notch filter and see how it works right? When I change the values the estimated notch filter values will change. Is that correct? My post filter values are whatever I have set in the drone. It does not have to do with the below values, below values will show the estimated values. Am I right on this?
Check the last IMU (2) it is the hard mounted one. If you have cube in the middle of large plate it may amplify Z-vibrations. Y-vibes are a bit high too.
I did not understand what point you are making here. Yes! the IMU (2) has more vibrations then other but has less Y-axis vibration comparable to IMU 0 & 1.