Pixhawk 2.4.8. Upon takeoff copter spins at approx 2 rotations per second either CW or CCW, but stays perfectly level. At takeoff, I can influence the direction of rotation by giving a small amount on the yaw stick but once it starts it won’t stop and the yaw stick has no influence. When it lands going back to idle I can reverse direction. I just transferred the Pixhawk from a quad that had no problems to a new frame with a 4 in 1 ESC. Any advise?
If you post a flight log, I can take a look.
If you can post a log you will get a better answer. I can guess that you have the ESC to FC wires wrong.
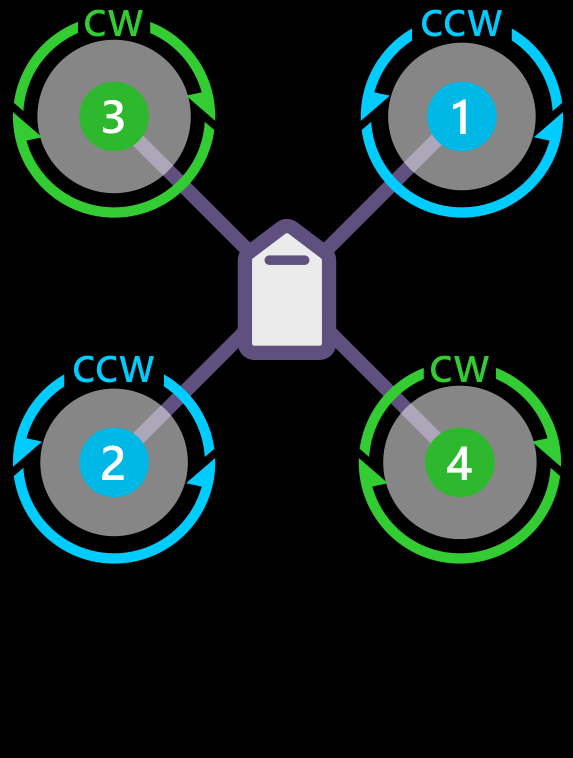
The log indicates that it is certainly a mechanical/configuration issue. I suspect hosein is right - your motor direction must be wrong. Since the copter doesn’t flip, the motor assignment is probably correct, and since you can initially choose which direction the drone starts spinning, your motor direction must be inverted.
If you want an inverted spin direction for some reason, then you can set your frame type to H-frame with FRAME_TYPE = 3
Solved! Thank you all for your help. My motors were all running backwards. That explains why it stayed level when it was spinning. I checked everything many times except that. It is now a smooth and quiet flyer!