Hello there, I am totally new in the ardupilot. What I am trying to do, is to simulate autopilot with sim_vehicle.py and control iris drone in the gazebo simulator. When I start the autopilot with this command
python3 Tools/autotest/sim_vehicle.py -v ArduCopter --instance 0 -f gazebo-iris --console --map
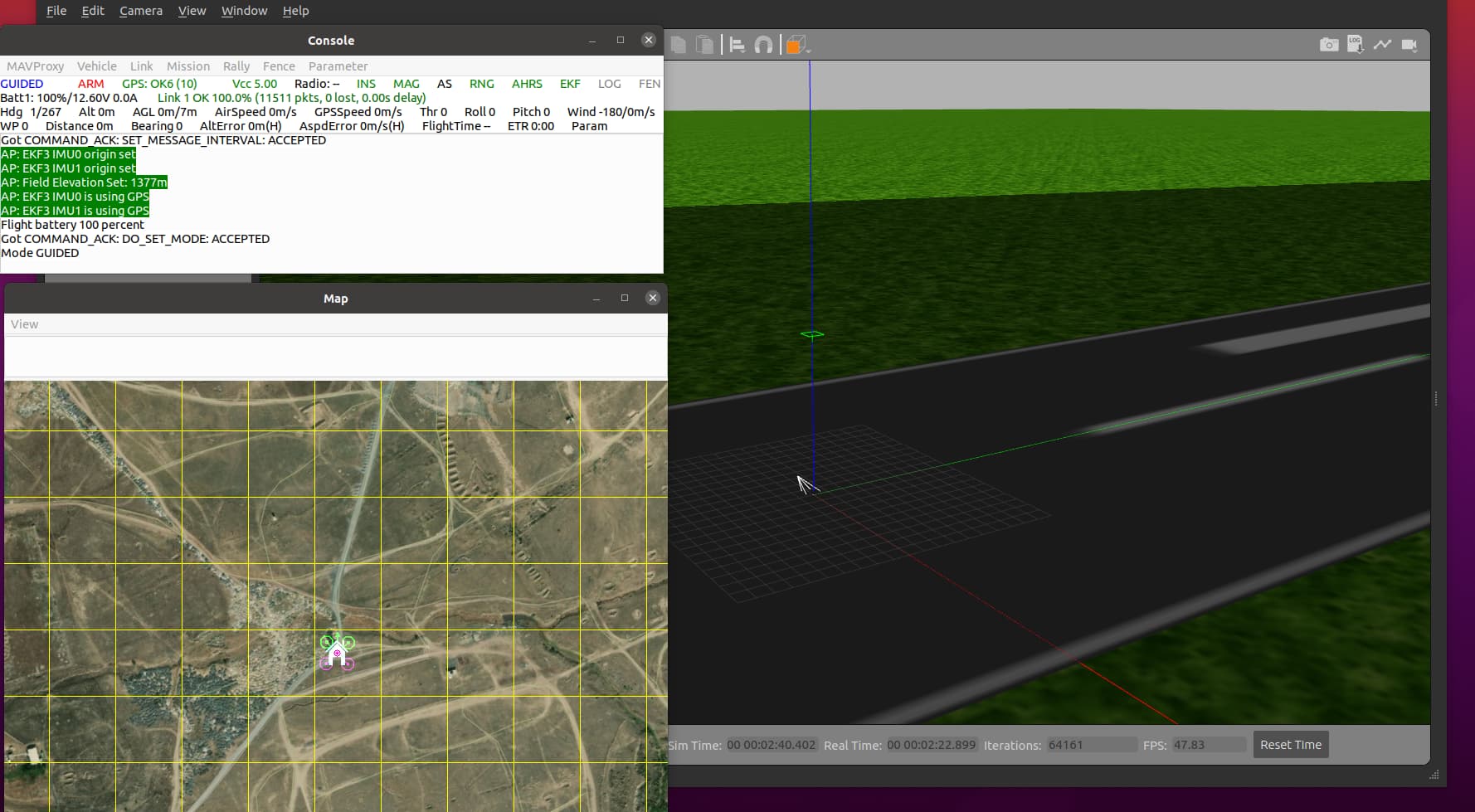
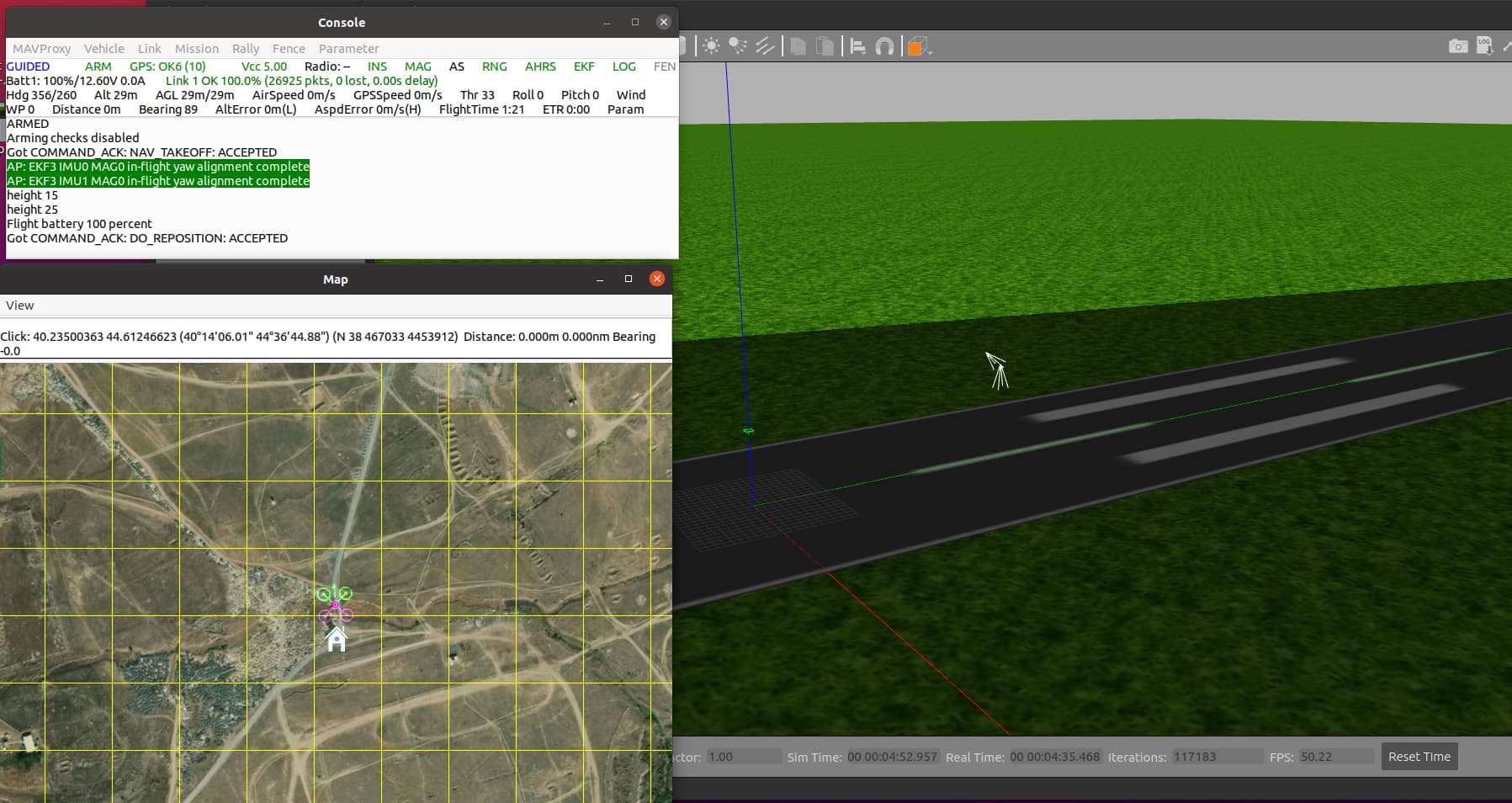
I can successfully arm the copter and do takeoff for some meters. Similarly I can see that copter raises in the gazebo properly. But when I select some point in the map of the autopilot and click the Fly To command it moves in the gazebo to the opposite direction. For instance if select the forward point in the map it will move backward in the gazebo, but in the map it shows that it moved forward. The same happens for moving the copter to the left in the map, but in the gazebo copter moves to the right. Something wrong with the configs I suspect, I tried to modify the heading yaw of the copter in the gazebo’s .world file but haven’t have any success yet. I attach two screenshots of the behaviour, also gazebo files such as world and model.sdf files.
Might appreciate any help, thanks in advance.
files.zip (5.1 KB)