My AC 3.6.7 based F450 Matek F405 Wing based QUAD just crashed after turning RTL OFF mid air (and returning back to LOITER).
Will be attaching logs shortly. It looked as if the FC just “lost interest” in keeping the QUAD stable in the air - it was flipping and rolling on its way down while the motors were still turning.
All characteristics prior to that were ideal (pos hold, cruise, landing…).
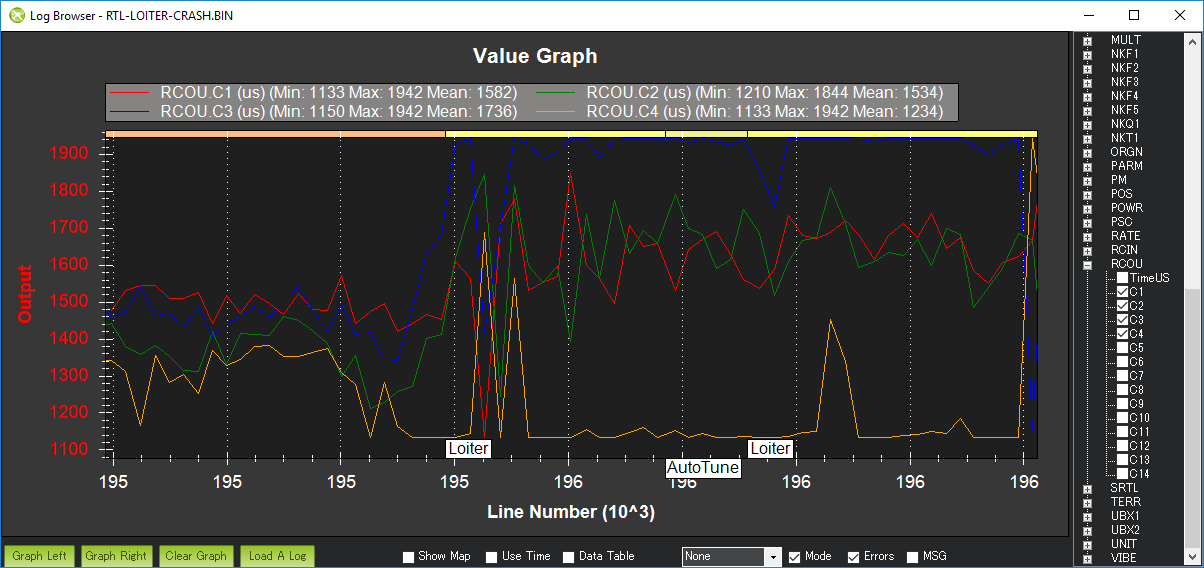
On the surface at least it looks like a failure of motor 3. We see the regular symptoms of a motor failure:
motor 3 (front left) goes to full and the opposite motor (motor 4, back right) goes to minimum
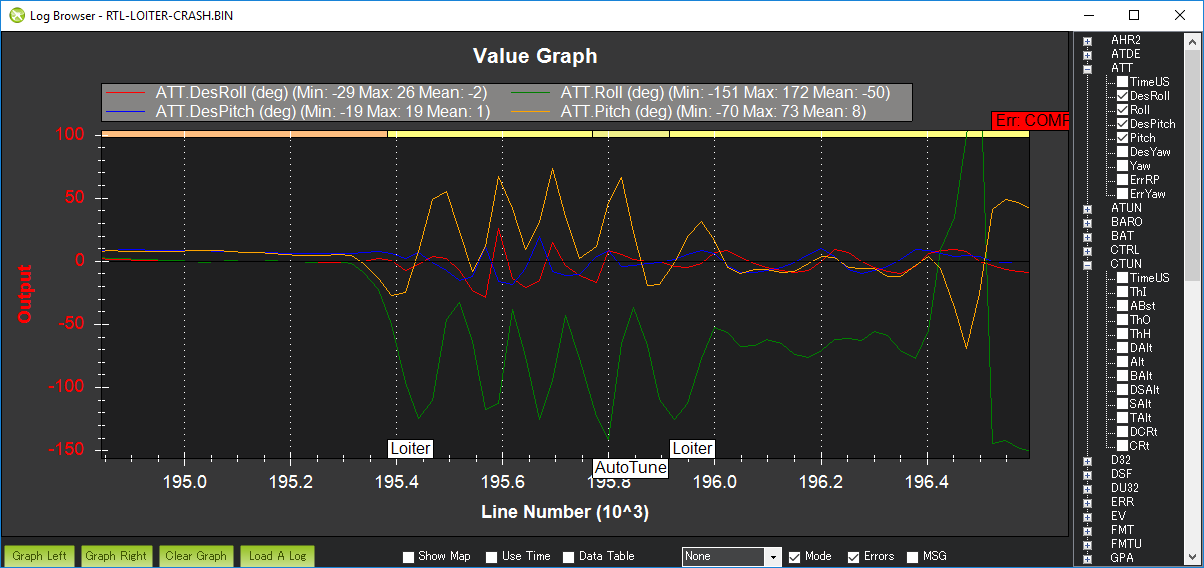
the desired roll and pitch remain sensible but the actual roll and pitch separate from the desired (i.e. the controller did not command the flip)
the vehicle pitches forward (negative pitch) and rolls left (negative roll) towards the apparently failed motor
The timing is suspicious in that it happens just after the vehicle switches to Loiter but that could just be an ESC sync issue caused by the vehicle suddenly trying to slow down as it enters Loiter. i.e. a bit of extra pressure on the ESC/motor and it failed.
as far as i know Xrtotor 40A ESCs rarely desync so this is definitely a surprising behavior to me.
in my case they power sunnysky 2814 900kvs with 11x4.5 carbon props
The motor #3 is dead but it is uncertain if this is due to crash or prior. 2 other motors also did not survive the crash