I have a strange behavior of my drone.
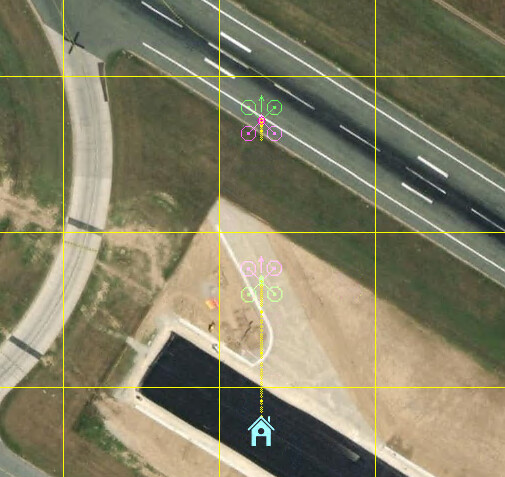
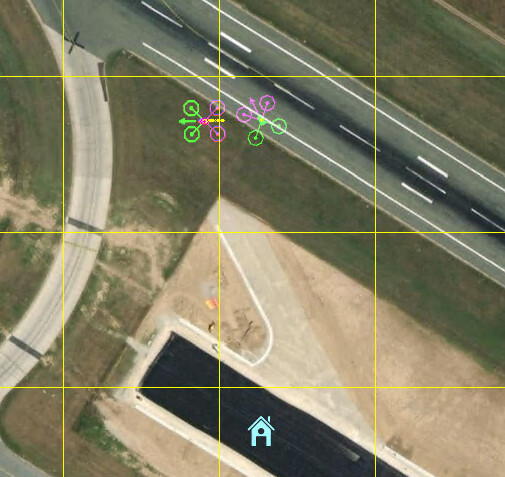
While on the flight I’m passing GPS data from GPS1 to GPS2, but the copter stops on the waypoints and waits when GPS2 “arrived” ( I can see it in the map module).
Does anybody have any idea why it happens?
If you can supply a link to the .bin log where that is happening we can investigate
Yes, sure. Here is it - 00000002.BIN - Google Drive