i have just built my new copter (h680 frame, with 15x5.5 props) and overall looks to me smooth… However when using loiter or althold, the vertical axis (during climbing or droping) the copter looks jerky and not smooth, In other axes it looks smooth… I have uploaded my datalogs 2023-10-12 19-08-06.bin - Google Drive… Could someone help me solve this problem ?
Furhtermore, when i try to use the Autotune feature, in missionplanner i get constantly the following message and i am not able to use autotune : AUTOTUNE: pilot overrides active
Why does this message appear constantly ?
That typically means one of the sticks isn’t centered, including the throttle. Make sure there’s no trim on your radio, and that you’ve done all the RC calibrations.
Edit: Just looked at the log. It’s the throttle. You need to have the throttle centered for Autotune to run.
I have done rc calibration before and i confirm that no trims are present in my radio…
I didnt realize my throttle was not centered but i think i had it centered to keep the copter at the same altitude when i activated Autotune.
If its clear from the logs, i will try again having the throttle exactly at the center.
Do you think that the reason i have a jerky behavior of the copter during climbing/descending is that ints not tuned correctly in this vertical axis ? and that autotune should provide better tuning ?
I also checked in mission planner the vibe indications and they are very low…
Make sure you follow the tuning guidelines. I didn’t look to see if you have set a notch filter. If you haven’t then you should Go back to the wiki and follow the tuning instructions.
thanks for the help.
I followed the tuning guide word by word unti the Save Trim-Auto trim chapter. Autotune worked. I feel like my copter is now very good.
But At first i updated to v4.4.1 and i realised my radio had some trim set (accidentally) so i removed it and autotune worked.
Since i dont know how to evaluate the log files, could someone have a look and tell me if everything looks OK ? In the LOG_BITMASK parameter i had everything active except fast attitude, video stabilization and harmonic notch filtering …2023-10-22 14-35-42.bin - Google Drive
You need to set the Notch Filter before running Auto Tune. Set these and make a short hover flight in Althold to collect data to configure it.
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
i tried to setup notch filters but i guess i didnt do it correctly because the flight behavior was a bit worse than it was without the notch filters. I will try again soon. I am using v4.4.1 arducopter.
anyway, the problem is that i realised that ALTHold is not very smooth in vertical movements of the copter. And also in Mission Planner , the EKF status several times turned Red. When i clicked on it, the compass bar was full up and Red.
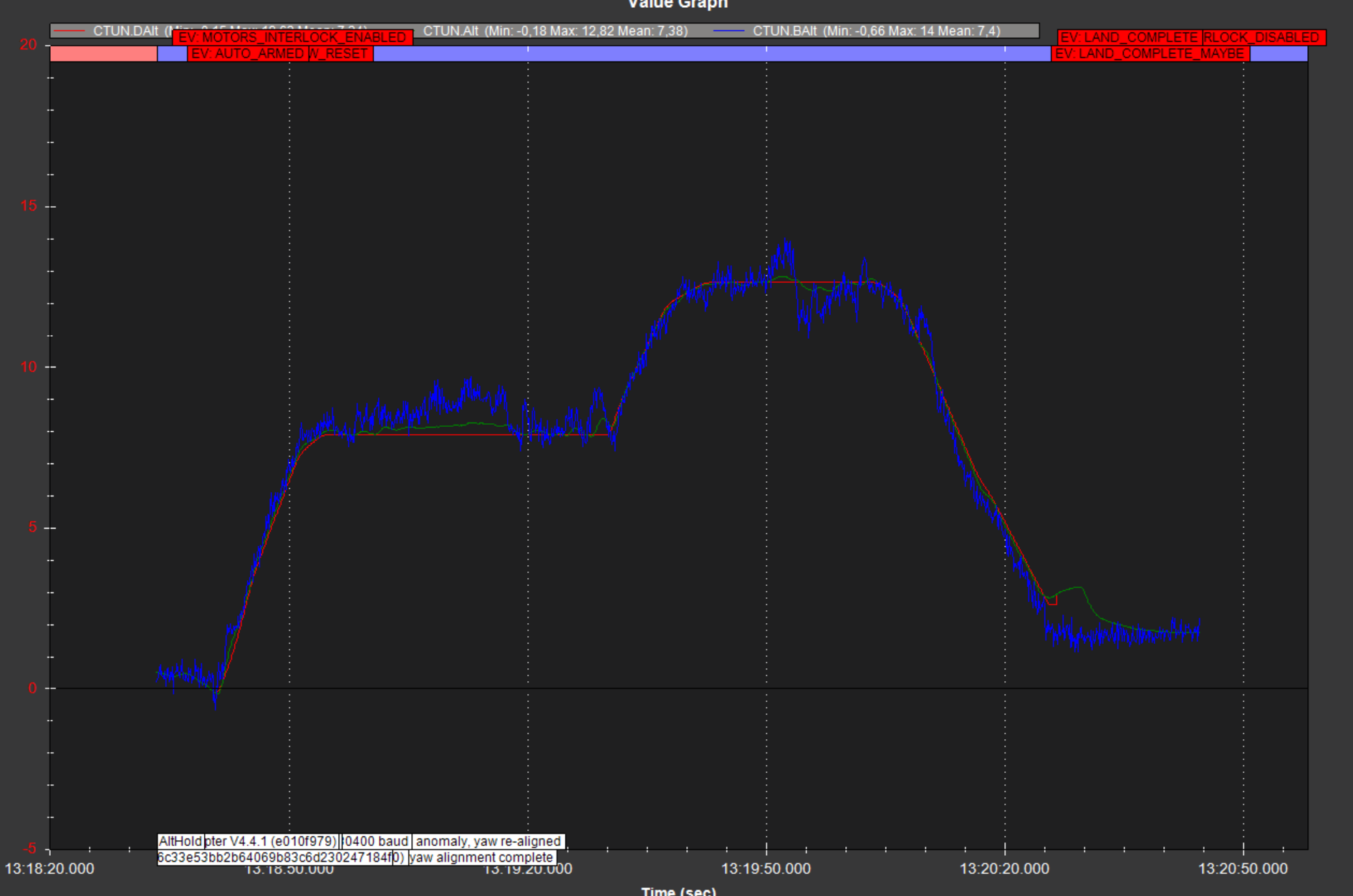
While plotting Ctun.BAlt of the .bin files, i see that it is a bit noisy compared to Ctun.Alt and Ctun.DAlt.
I uploaded the .bin files of two simple flights. Do you find it normal ? If no, what could be causing this noisy plots ?
Disable the 2nd Notch Filter. You have both running on top of each other. And if you want help configuring it set this parameter and post another Hover flight log file link:
INS_LOG_BAT_OPT,4
thanks for your feedback.
I didn’t know that one of the 2 notch filters should only be active . I will disable the second one by setting INS_HNTC2_ENABLE = 0. I will then set INS_LOG_BAT_OPT= 4 and perform a simple Hover flight ( i guess in AltHold ?) and send you back the .bin file as soon as possible. Thanks.
Regarding CTun.BAlt plot of my previous post, does it look normal ?
i guess i should move to pixhawk… I was using this because it was convenient for me to setup a 4g connection in raspberry pi and then connect copter to mission planner through UDP connection.
If you have any link/resources that shows how to connect a pixhawk to raspberry pi, i would appreaciate it.
Sorry for my late reply but i was able to fly today.
I deactivated 2nd Notch Filter, I set INS_LOG_BAT_OPT=4 and i made a short Hover flight. This is the log file. 2023-12-2-12-47-57.bin - Google Drive
Could you now tell me what to parameters to specify for the Notch Filter to improve my quadcopter?
@dkemxr I also made one more flight where i tried AltHold and Loiter flight modes.
Although i didnt receive any GPS warning/error messages in MissionPlanner, when i was hovering in Loiter, the copter was not staying solid but it was moving around in a diameter ~2meters. Why is that ?
This is the log file. 2023-12-2-13-40-59.bin - Google Drive
Do you see anything else that looks bad and would you recommend anything that would improve the copter’s behavior ?