The notch filter is configured correctly, nothing more to do there.
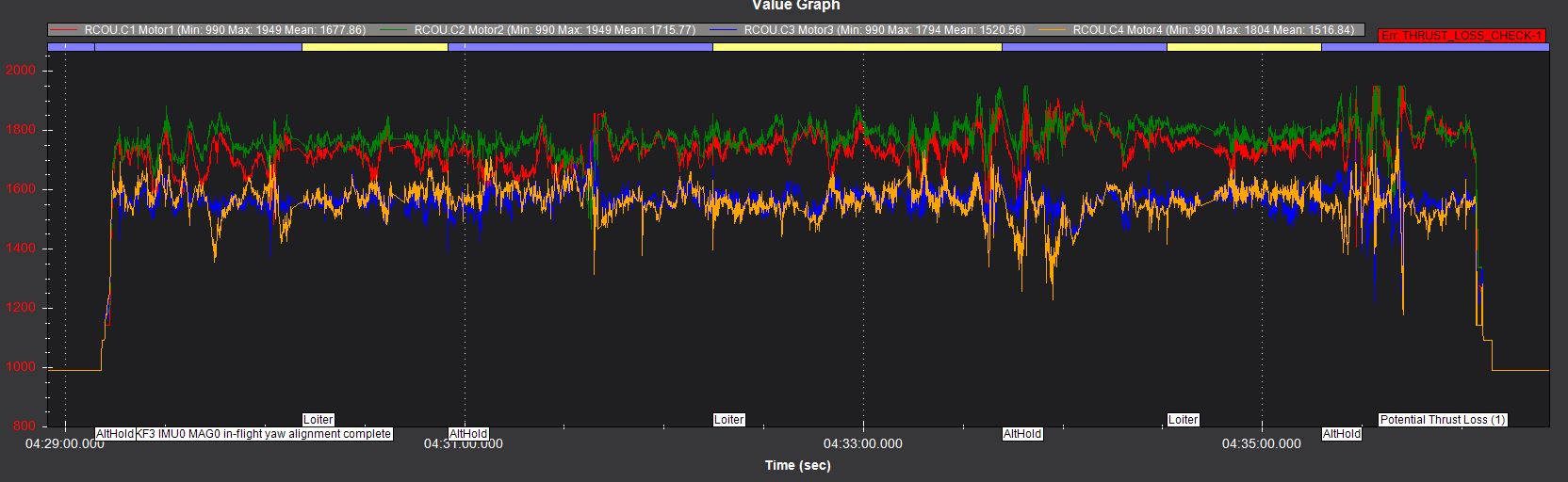
But, you have 2 related problems. A significant Yaw bias (twisted motor mounts or arms) and it’s overall underpowered/overweight. See the Potential Thrust Loss message?
You can see some motors hitting max which will cause instability. If you fix the yaw bias by leveling the motors it will help matters but it will still be a bit underpowered.
Nice to hear that I set the notch filter correctly.
My quadcopter is exactly 2kg.
The motors I am using are RCTIMER 5010 360KV with RCTIMER CF 15x5.5" props.
I am using a 4s Li-Ion battery 8000mah.
The maximum thrust that this motor/prop/4S combination can give is around 1200g. THere is also a video from a test of this combination https://www.youtube.com/watch?v=HgFtN41MAUg
So I guess my setup should be more than enough and nice balanced. Also i checked and my motors are leveled correctly.
No, it’s because you have a large Yaw bias (not level) and it’s underpowered. The predicted Hover throttle with that kit of parts and weight is ~66% (should be 50% or less) which is what the log is showing:
Those motors from RCtimer are of very low quality and I wouldn’t believe anything they published regarding thrust. Buy a subscription to eCalc and run the numbers for your self.
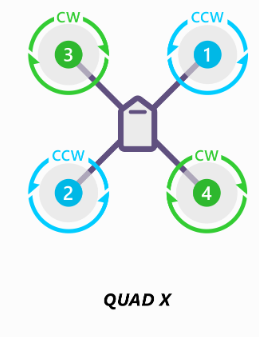
So the motors that should be leveled are motors 1 and 2 , which is those motors as shown in image (i am running quad X motor order) ? front right and rear left
Not necessarily. 1 unleveled motor can cause problems. For sure fix it but you can see that even after you do the average output will be ~1650µs so under demand you will almost certainly encounter thrust loss errors. And when that happens stability is compromised.
@dkemxr i tried to level all motors as much as possible and now i believe they are completely flat…i also tried bigger props that I had and I made a new test.
Do you find it ok now or still anything problematic ?
To me it seemed that in AltHold it behaves nice. But when i switch in Loiter the copter started shaking and acting strange . I had Hdop 0.6 and 17 sats.
Whats that weird behavior when i switch to Loiter ? Maybe the problematic Navio2 with its problematic gps ? Can you find anything problematic in Loiter from the .bin file ?