I bought a pixhawk for the posHold feature, but am having trouble getting it to work. I have my 10" multirotor flying manually in Stabilize/Acro mode, but whenever I try to enter Alt Hold, Pos Hold, or loiter(with receiver switches), the copter stops spinning motors and falls to the ground. Exiting those modes starts the motors again.
The multirotor has 3D GPS lock when armed.
Attached is the logs of a short flight demonstrating this behavior. 00000015.BIN (484 KB) 00000015.log (979.0 KB)
Am I missing some configuration? Any help would be appreciated.
Hi @tuckjohn
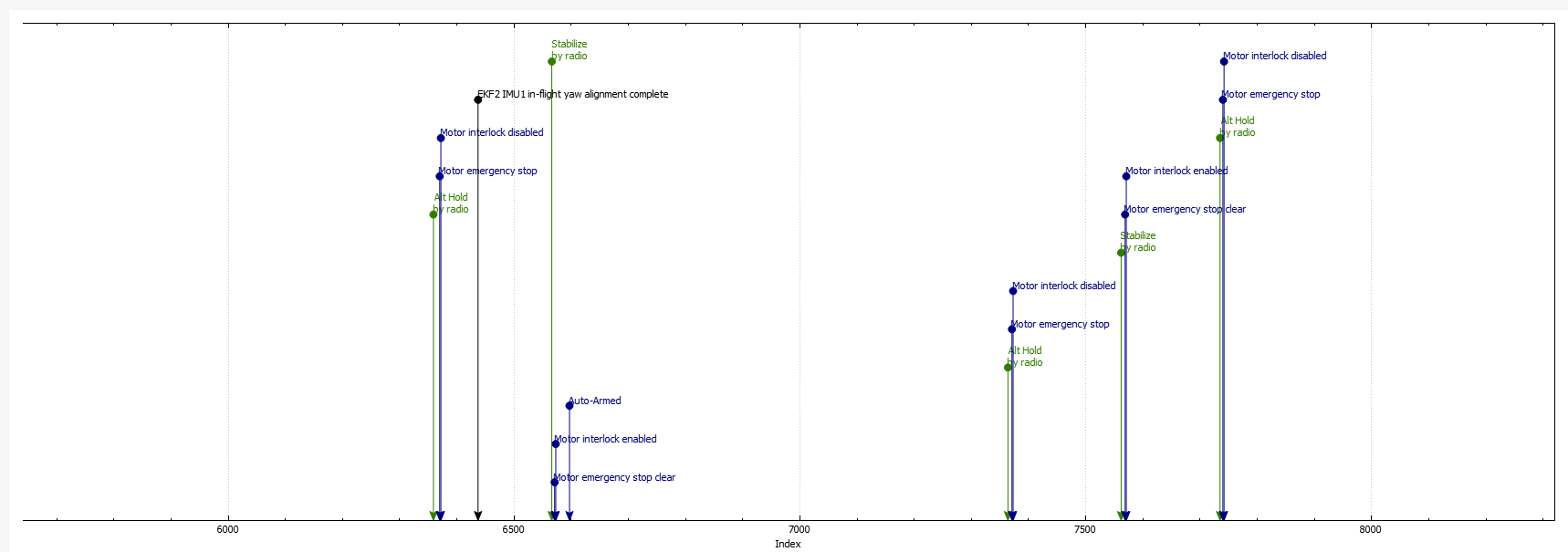
your chancel 5 and 7 are bonded together (maybe you configured like this in your radio control) and channel 7 configured as emergency motor stop
Yea, I had one of those. Not the greatest for Arducopter. Personal preference (or just what you have) I know but i wouldn’t use a radio that wasn’t OpenTx capable.