Hello,
I’m using quadrocopter with PixHawk 2.1 for a while. Recently, I installed Gremsy PIXY F gimbal and FLIR camera. To do that I reconstructed the copter a bit and change the battery arrangement to keep the weight centered.
Then, I was flying the copter for 2 hours total with the weight simulating the gimbal and camera to test if everything is fine. And it was.
On the test flight with gimbal and camera on board, when I have tested battery life and copter behavior, out of the sudden copter has fallen onto the ground slowly, even though I increased throttle. It seemed it has landed, however was not in land mode. Battery level was still like 30% left. No FAILSAFE I noticed.
I have tried to analise the log but found nothing indicating what was happened.
I would appreciate help in investigation the problem and finding the reason of such odd behavior of the copter.
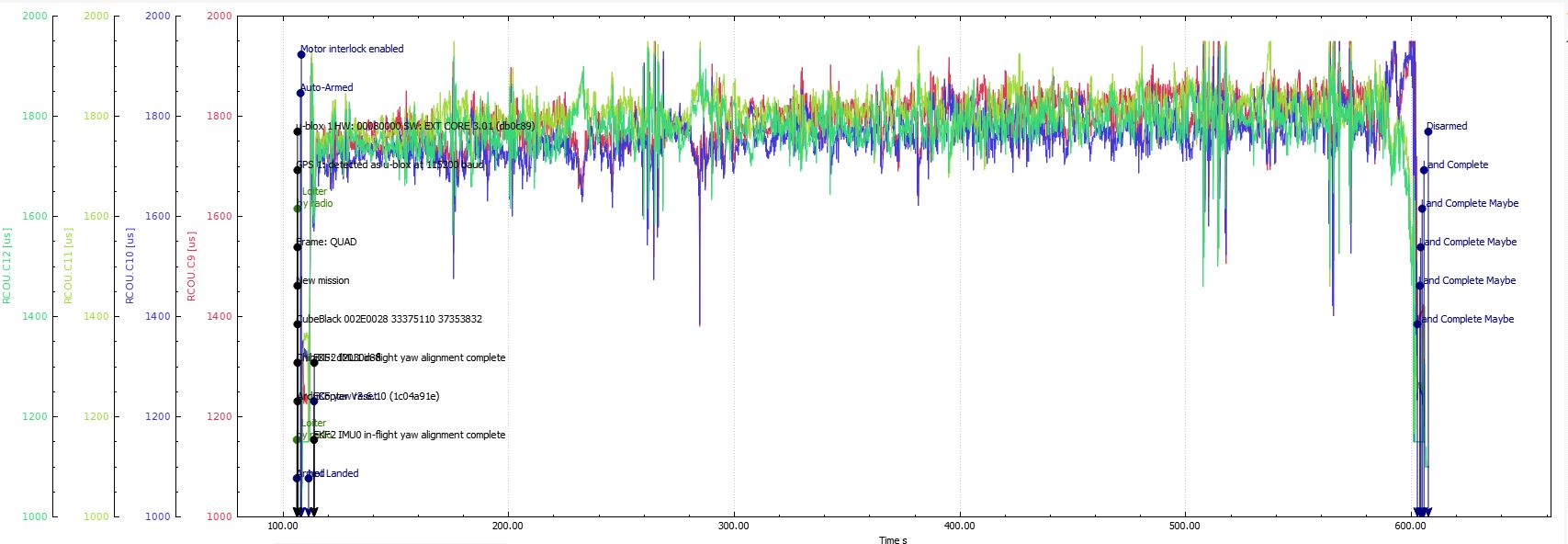
There is one more thing I’m not sure since have not much experience with gimbals. Gimbal was in follow mode. It means that copter yaw the gimbal follows the move of the copter. During the incident the motors 1 & 2 worked at the max power, while motors 3 & 4 kept reducing the power. May the situation be caused that heavy payload (gimbal and camera) was rotating and copter to keep stable yaw reduced motors 3 & 4 and kept loosing height?
Dave, thank you very much for your post.
BTW, may you share what software do you use to analyze the logs. I have used Mission Planner embedeed software only so far.