First the we changed the firmware a little, but never the main function, especially EKF.
We are always using EKF3, and stable in 3.6.9.
When we were flying at about 35m high, drone suddenly climb to 137m and out of control in Poshold mode, we know we may could control it in Stabilize mode, but did not set this mode in remote.
This is not first time we ran into this problem, drone once climbed to 360m high before and very dangerous.
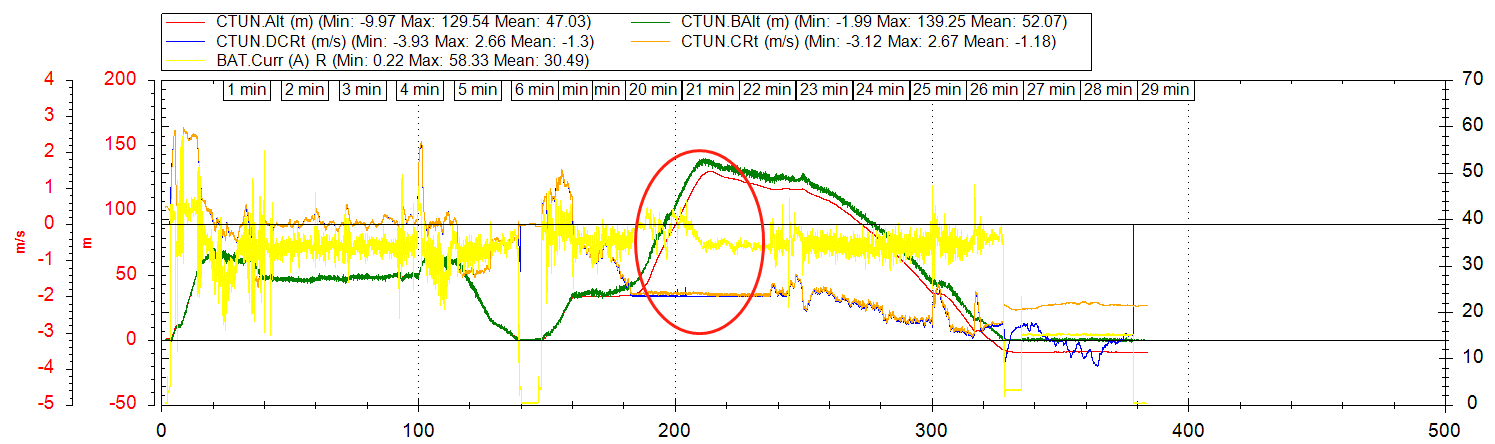
We know there was something wrong with EKF, the 360m flight it showed EKF variances because compass not good. But this 137m flight, we did not see EKF error, from the log, only saw XKF3.IPD very high value and the climb rate very not match the altitude, means a negative stable climb rate with a actually drone climbing up.
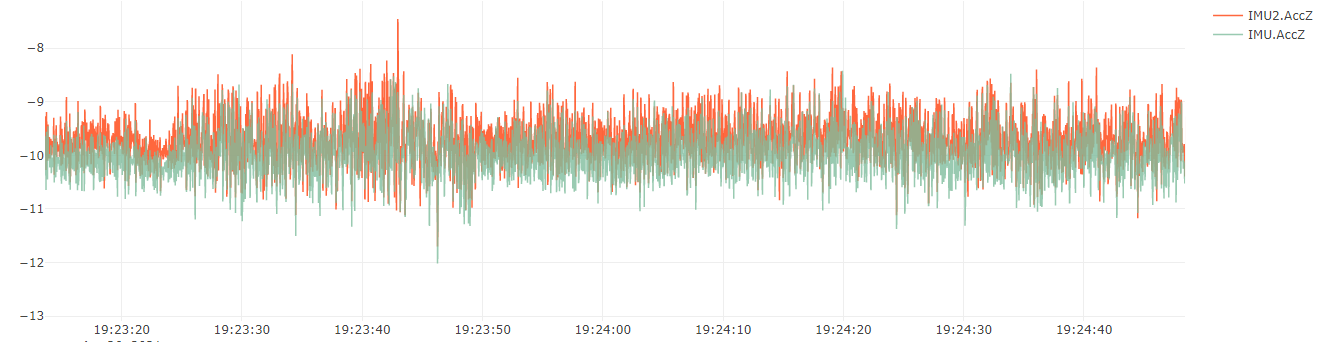
It could be the IMUs too.
Here’s yours from around the time of the climb, hardly any movement at all and even zoomed right in it still looks like noise
@xfacta Thanks for you help and analysis.
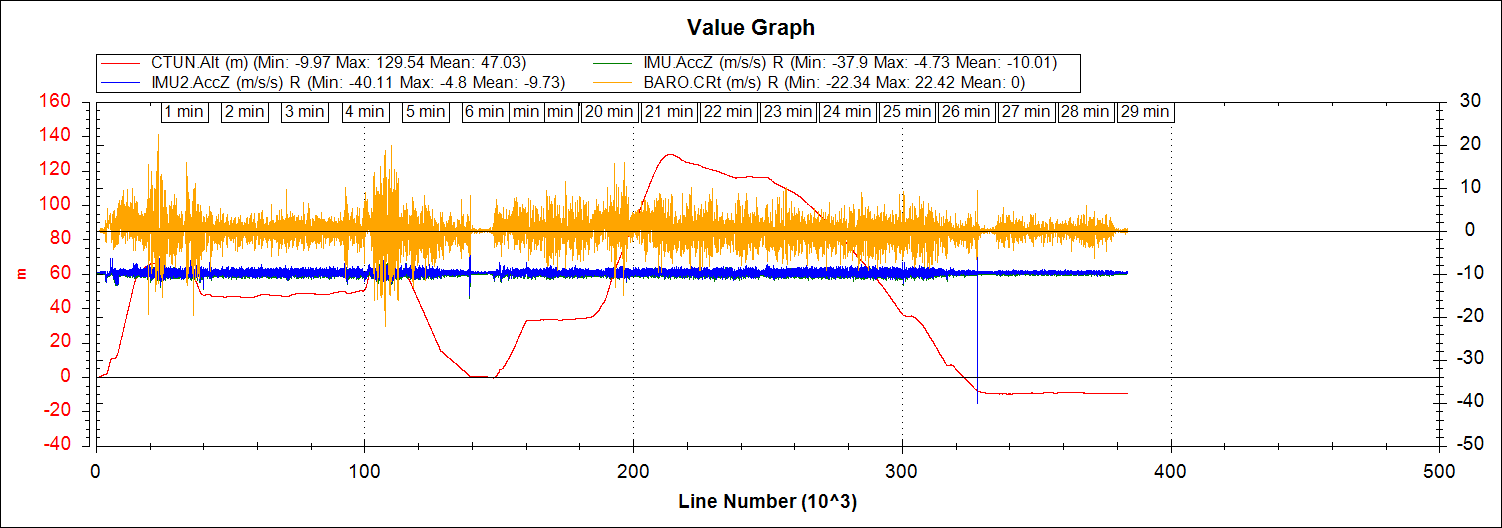
We have checked IMUs, what you said is right.
But from climb rate of Baro, did not see any obvious value too, so we think drone climb up with a low rate, this drone we flew a lot before, and it was all right.