After did some changes inside my drone, i went for the test flight and during flight my drone was crashed(fliped same time during takeoff). when checked the log file found compass error. Please check the log file and photo of auto analysis and confirm the reason of crash. Surprisingly after fliping the drone not disarmed until i removed the power plug
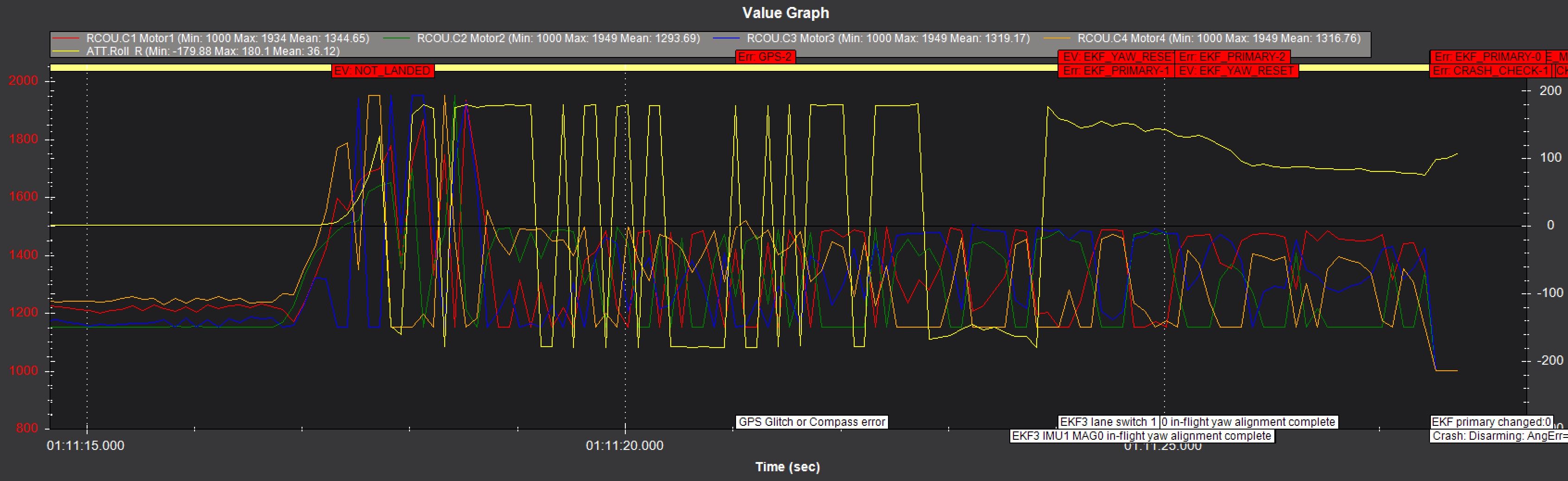
Auto Analysis is of no value it’s so far out of date. The “GPS glitch or compass error” came after, and a likely result of, the craft rolling around on take-off. Sure you got the motor order and direction right after making the changes you mentioned?
It’s not clear from the log. On throttle up some motor outputs go to max and it starts rolling. That’s what can happen if the motor order or direction is wrong, or maybe a prop breaks but you would presumably see that.
Yes, soon after i put the throttle up it was flipped like wrong propeller direction. But the props are placed correct and the main thing is that if any thing was wrong the message should came in herelink. After the carsh the props are broken and it was not disarmed till i removed the power plug
Before the crash copter was excellent. My changes are before crash;-
the power connector from XT90 to XT60,
installed neopixel LED and connected to Aux port 1 and to power the neopixel i connected a 5v BEC to auxport2 and changed the configuration of servo 9 funtion to neopixel and NTF_LED types
Nothing to do with the crash but after fixing it properly configure the notch filter. It’s doing nothing now. Got a log of a previous flight that went well?
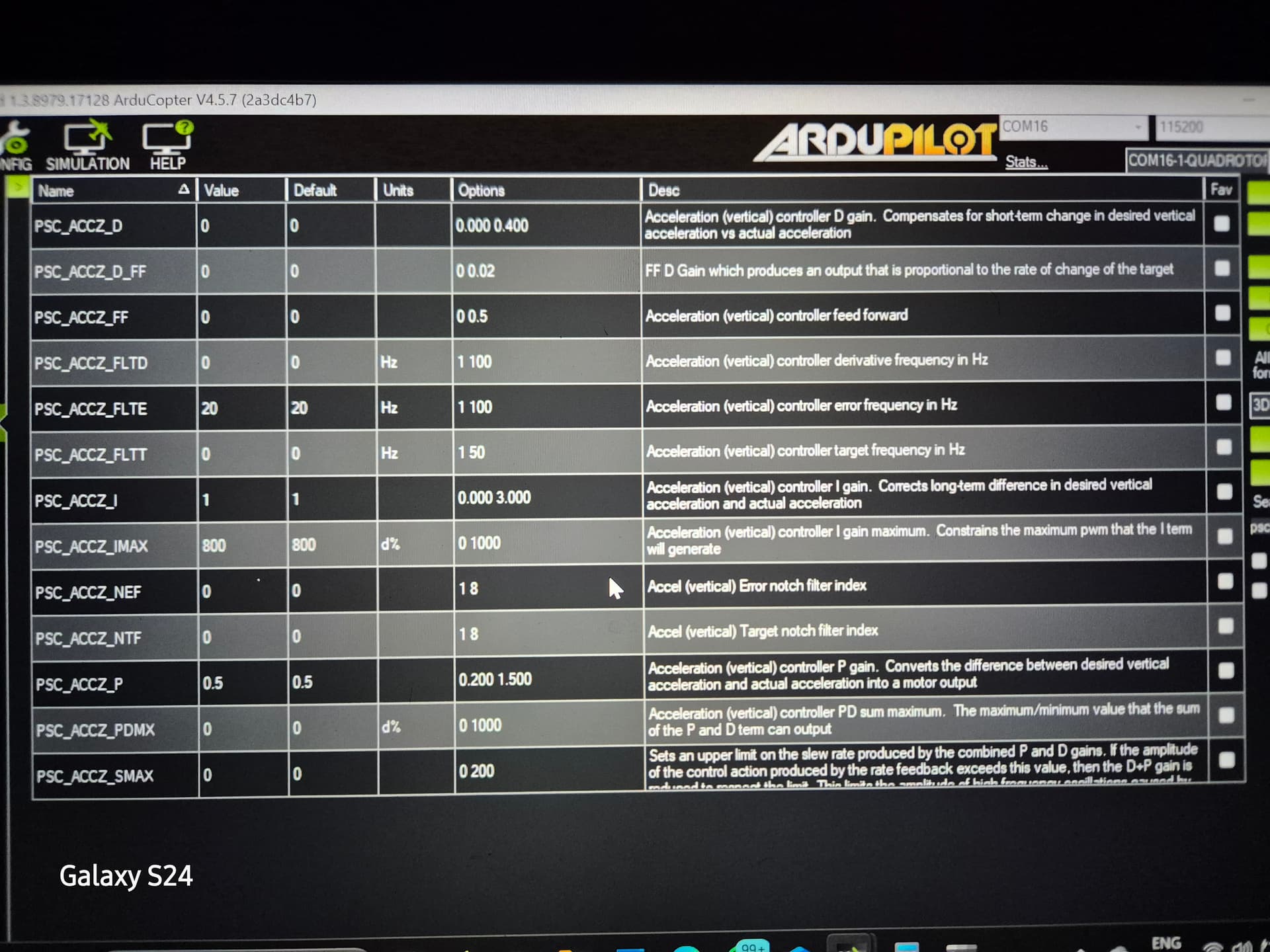
Nothing remarkable. I would suggest setting the PSC_ACCZ_P/I parameters appropriate for the hover thrust value, configure the notch filter (needs a reference) and re-run Auto Tune but none of that would cause the event you witnessed on take-off.
The copter was well tuned with Tmotor NS1654 props. But after the configuration i went to fly with the folding props 1555. I think it should not make any difference.
No no, i flied the drone 50-60 times and, i generally used Tmotor NS1654 props, but for checks after any changes i flied with tarot 1555 folding props and these are cheap price, so if any crash will happen the loss will minimal.
Are you sure you mounted the propellers correctly before this flight? The log and crash/flip on takeoff is often a symptom of having a wrong prop on one or more of the motors.
I can’t think of any other common reason why an aircraft that has flown multiple times before would do that (unless the landing gear got snagged on takeoff).