I have a Crash log, but I can’t post it for help. Can anyone help me?
Huge size OTC copter over 200KG weight
Crash in seconds in stabilize mode
Dare not fly in autotune mode, afraid of crashed,but in the end,it crashed finally. I want to know why?
thank you so much! Excuse my poor English
Can you post your hardware configuration too? (motors, esc’s, props, flight controller, dimensions)
PX4v3
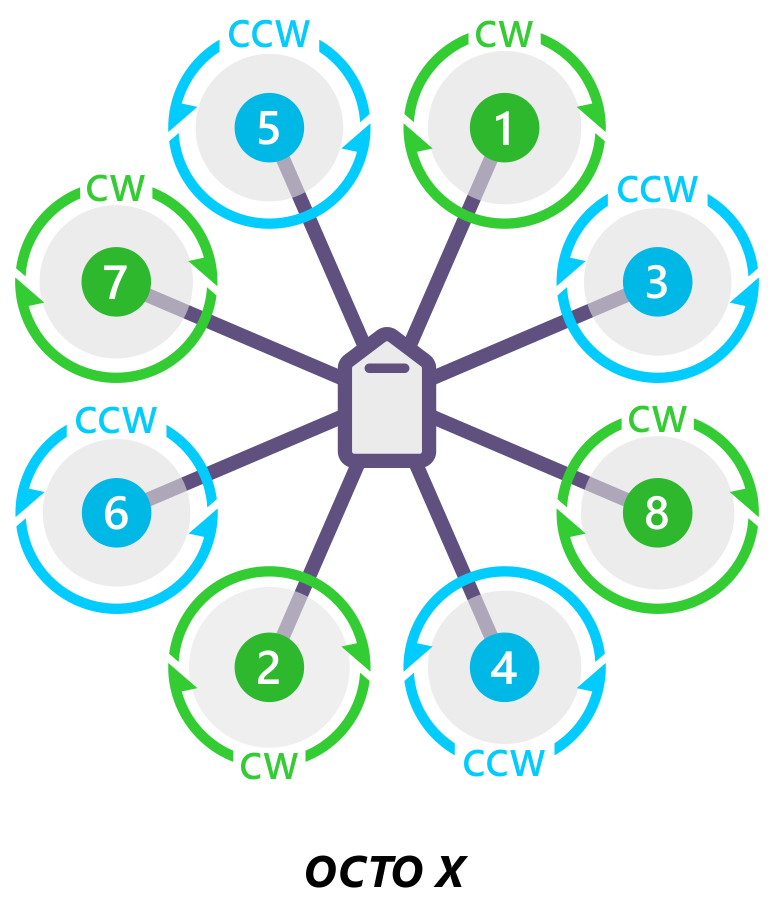
Frame: OCTA
PX4: b535f973 NuttX: 1bcae90f
APM:Copter V3.5.7
ESC:200A
props:62inch
Dimensions:275 inch
Wow! That’s a huge copter. What was the take off weight?
it seems that your throttle suddenly dropped or decreased by radio before switching to poshold
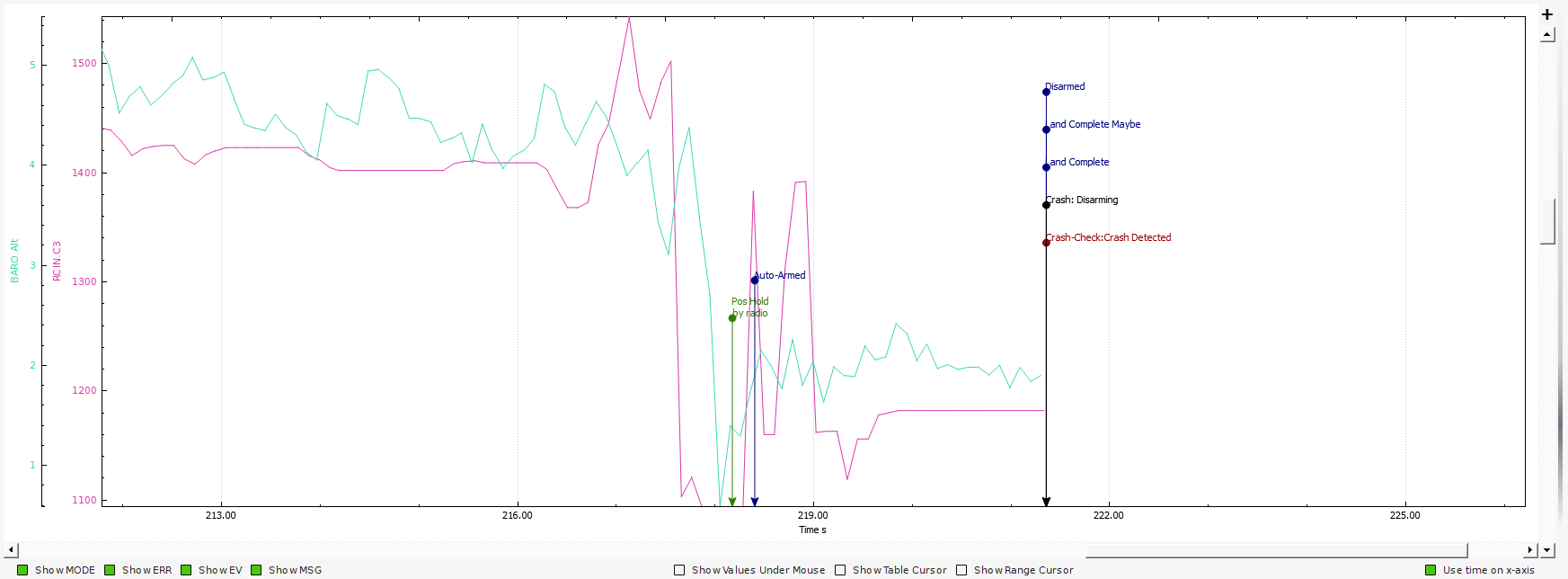
also i think there is a problem with your motor 6 (or ESC)
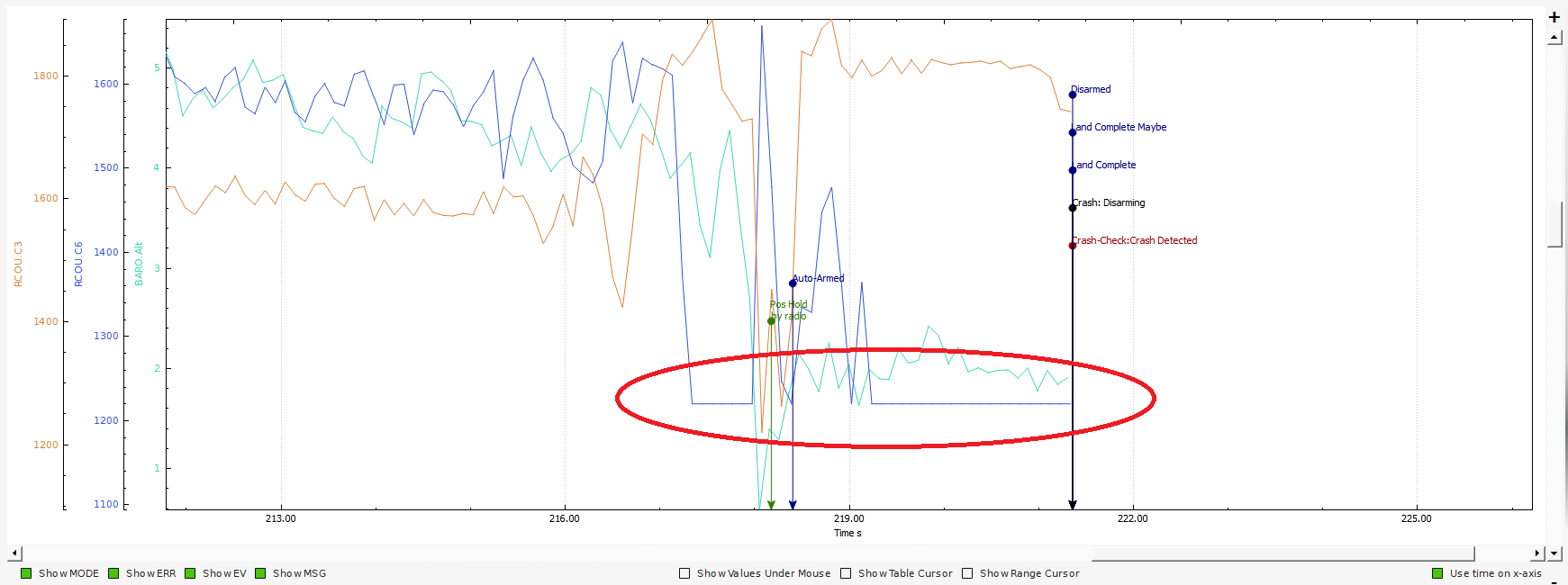
motor 6 not trying to climb copter like other motors
most of the time these type of lines says motor problem
take off ,280KG weight
yes, throttle decreased by radio before switching to poshold, it was flustered and mistakenly operated
before switching to poshold,the copter was crashing,so …
thanks you very much,housein
I doubt whether the PID is not tuned to the optimal, leading to loss of control, I am not sure.
I will check the motor 6 and ESC 6 tomorrow. thanks again!
No.1and No.3 No.8 props had been damaged
if your PIDs are not tuned it could be reason of crash in fast movement as my experience with a 3kg hexacopter but it hard to say surly in your case
It can hover steadily, but it never try to do the movement very fast
Check motor and ESC 3 not 6. It was commanded high maybe due to lack of thrust (motor, esc, prop failure). Motor 6, the opposite was commanded low to compensate.
Why have you turned your arming checks off?
Have you read through the new Tuning page in the Wiki?
In particular I notice ATC_THR_MIX_MAN is way off.
Looking further I see a lot of values more suited to smaller copters.
Everything seemed to go tits up when you used yaw.
Digest the Wiki page, make changes, and try again.
Any specific reason why you are using such an old version of ArduCopter (3.5.7)? Nuttx has been deprecated.
your log is here https://plot.dron.ee/qaRe
Please update to the latest release version and as said above follow the wiki carefully, specially taking in consideration the size of that vehicle.
As an alternative consider having a professional help - http://ardupilot.org/dev/docs/common-commercial-support.html
Yes! yes! I haven’t read through the new Tuning page in the Wiki
And by the way, what’s the appropriate value about ’ ATC_THR_MIX_MAN’ in initial flights?
As you said,the ‘atc_accel_P/R_max’ and ‘ins_gyro_filter’ were for smaller copters! It was my fault ,mistakes of inexperience
May I ask you about other considerations for huge size aircraft?Can autotune mode be used for huge size aircraft?Will it be crashed in autotune mode ? I worry about the Inertia is too big
*Ok, thank you very much for your advice
I used the old version of 3.5.7 ,because the logs can be opened by apmplanner 2.0.24,but the new versions can’t! And I don’t know what the difference was between old and new.
what’s the suitable value about ‘ATC_THR_MIX_MAN’ for this octa-copter?
I am very appreciated for your reply,thanks a lot.
This copter hovered in stabilize successfully for several times until it crashed