Hi there,
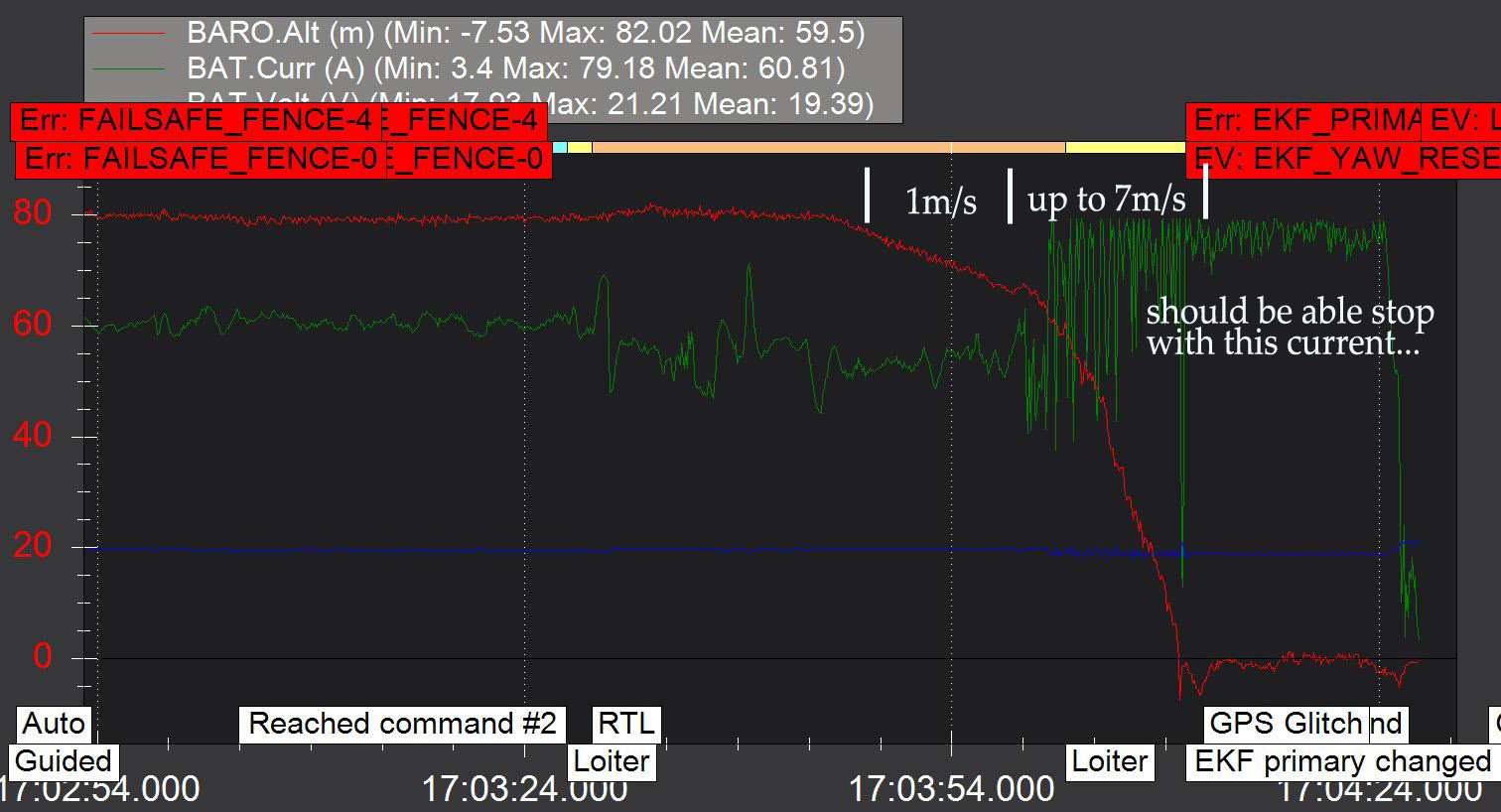
I need your help. One of our copter crashed, as it was about to land (motors and props are still fine). It started to land accordingly to its programmed 1m/s and then it suddenly descends faster and faster. We even pushed the thottle to its maximum, but it didn’t help. Even so the battery is nearly empty, it has anough power to keep the drone in air (regarding the voltage and current). So why did this happen? We had this error mutiple times now but not with each copter. Until now I was not able to find the course of this matter.
This is the specs of the copter:
X8 24" Props and ALPHA 40A ESC
60000mAh Li-ion Battery 2C
12kg in total
My gues: There are rare situations where the motor is out of sync (when battery under 30%) - So an ESC Problem.
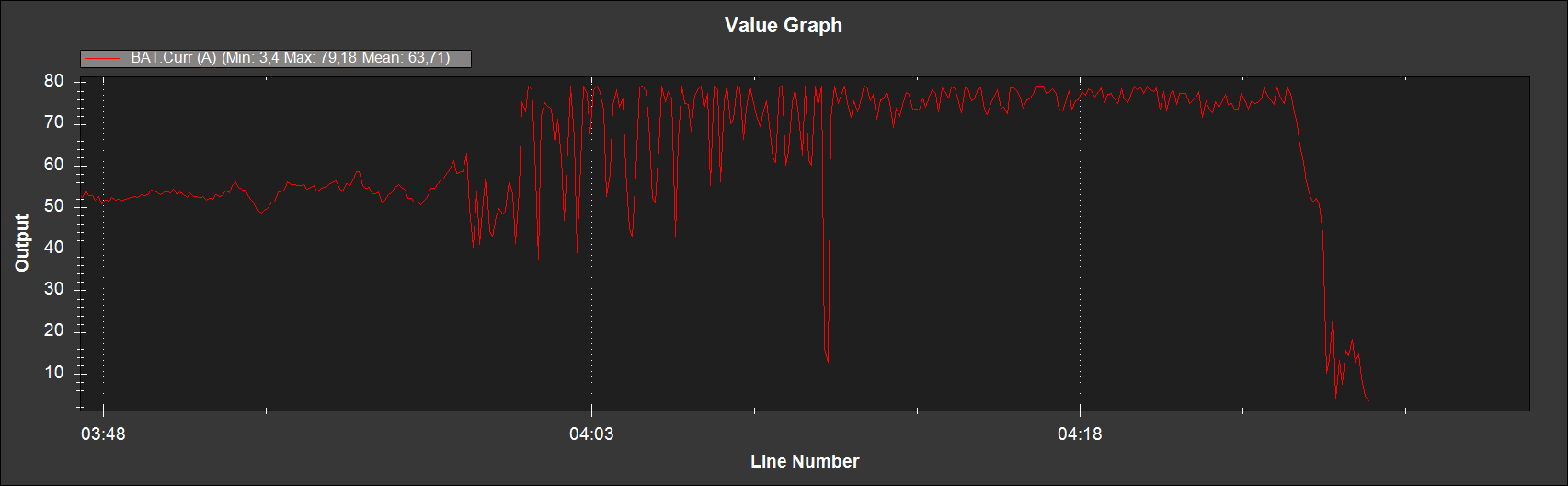
That would explain why we have a high current, because the esc trys to get back in sync with the motor, but it can’t. That means, the other motors have to adapt, therefore the copter has to desends.
I know here are much smarter guys like me, so hopefully someone can help me to find the cause of this…
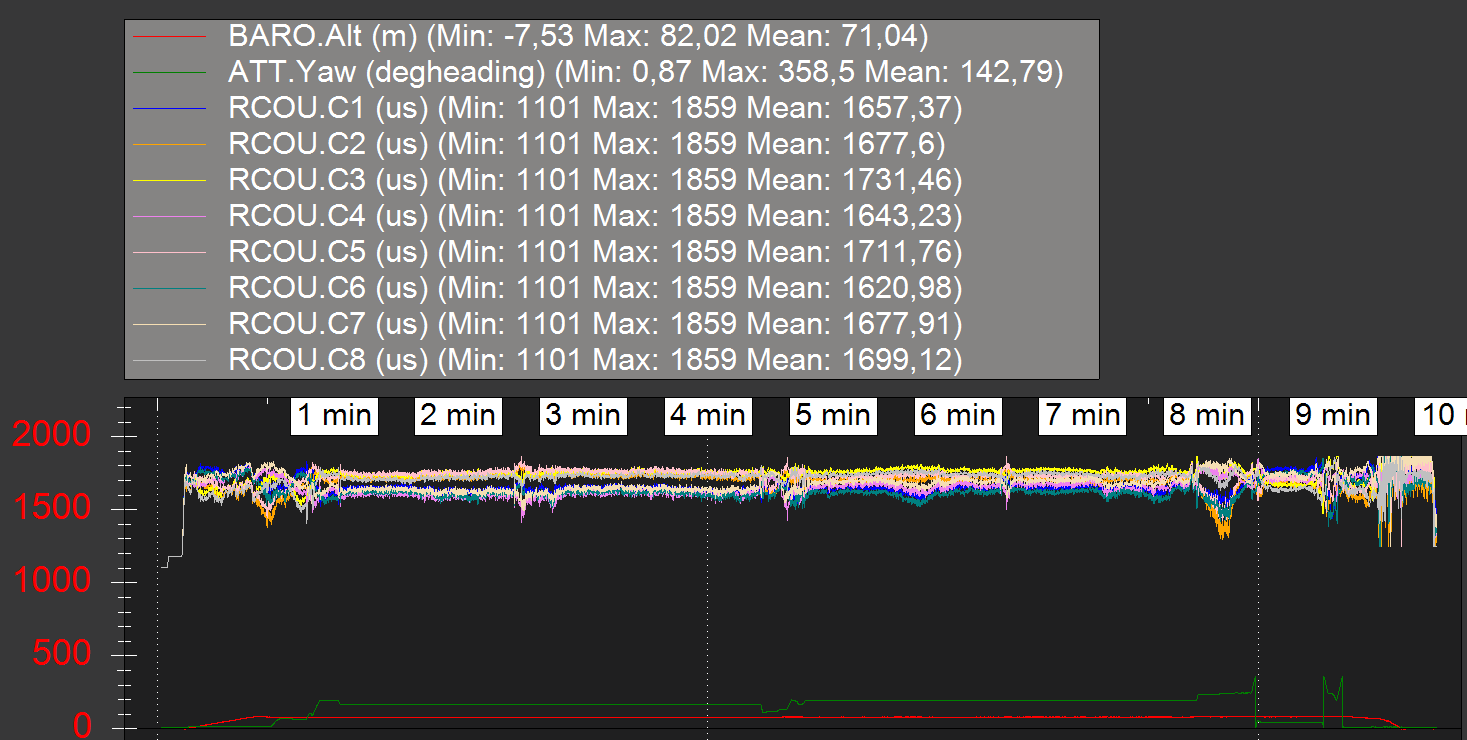
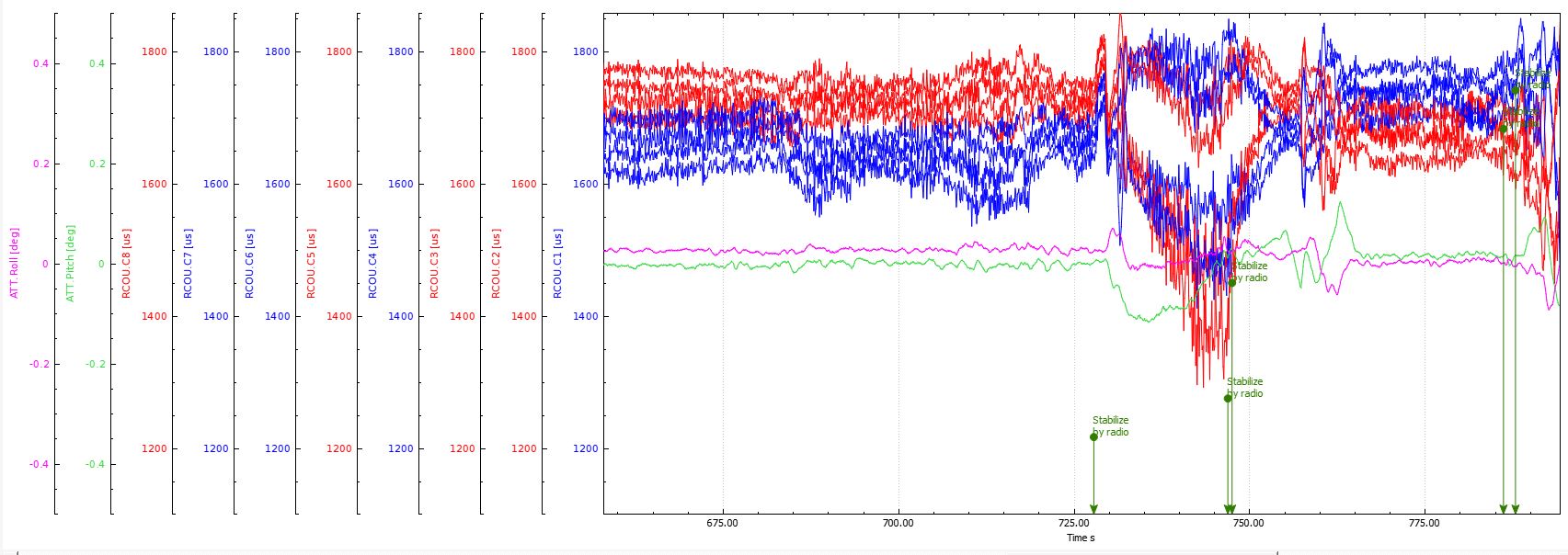
Large motor imbalance (left side commanded higher) and an average hover motor output of ~1700us doesn’t look good. It looks like the CG is off and it’s generally under powered/overweight . During the decent event many of the motors were commanded to max and it’s still descending. There will be no stability in this circumstance.
Thanks @dkemxr for your time,
even if there’s a motor imbalance, this can’t be the main problem. It is also not uncommon that lower and upper motors do not always run in sync, especially in windy conditions. Unless it’s due to our ESC’s, which are all correctly calibrated.
Keep in mind, the drone was flying good until that moment and there was still room upwards (1850 is the top). With a little more throttle the drone should have stopped. In addition, the drone was already descending, where it consumes less power anyway…
It’s not the upper/lower motors that show an imbalance it’s L/R. It may not be the main cause of this issue but I think you have insufficient thrust/weight and are asking for trouble.
What you call motor imbalance, I call wind.
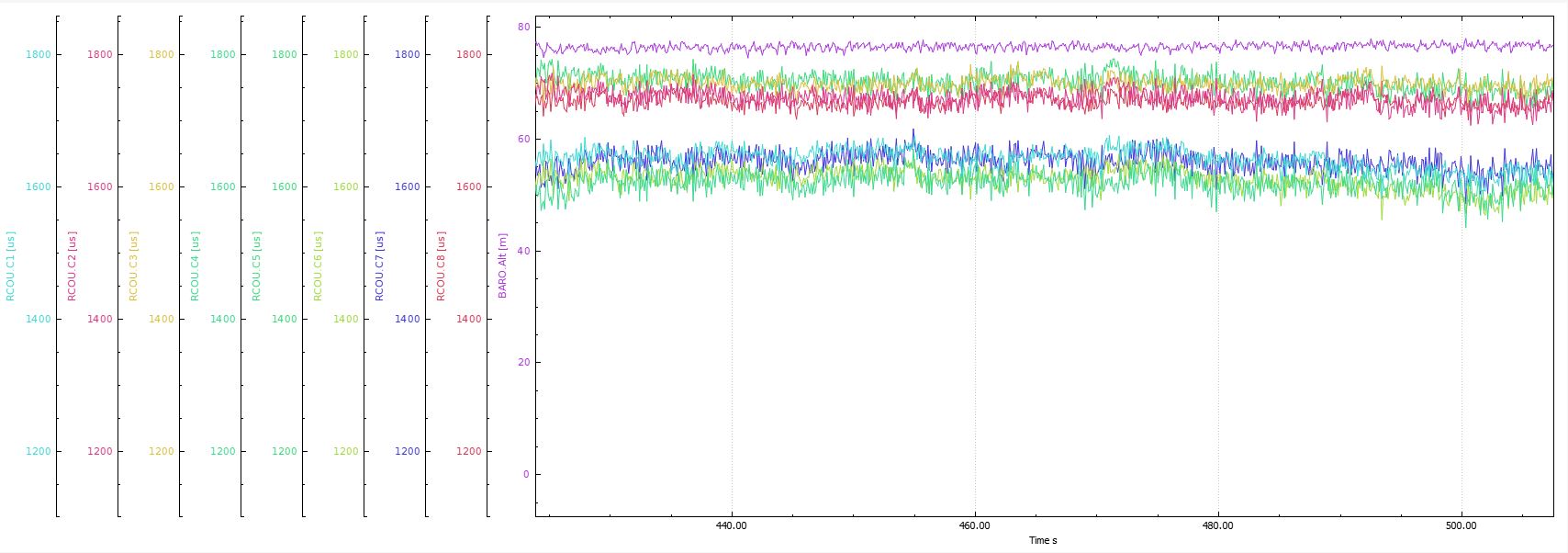
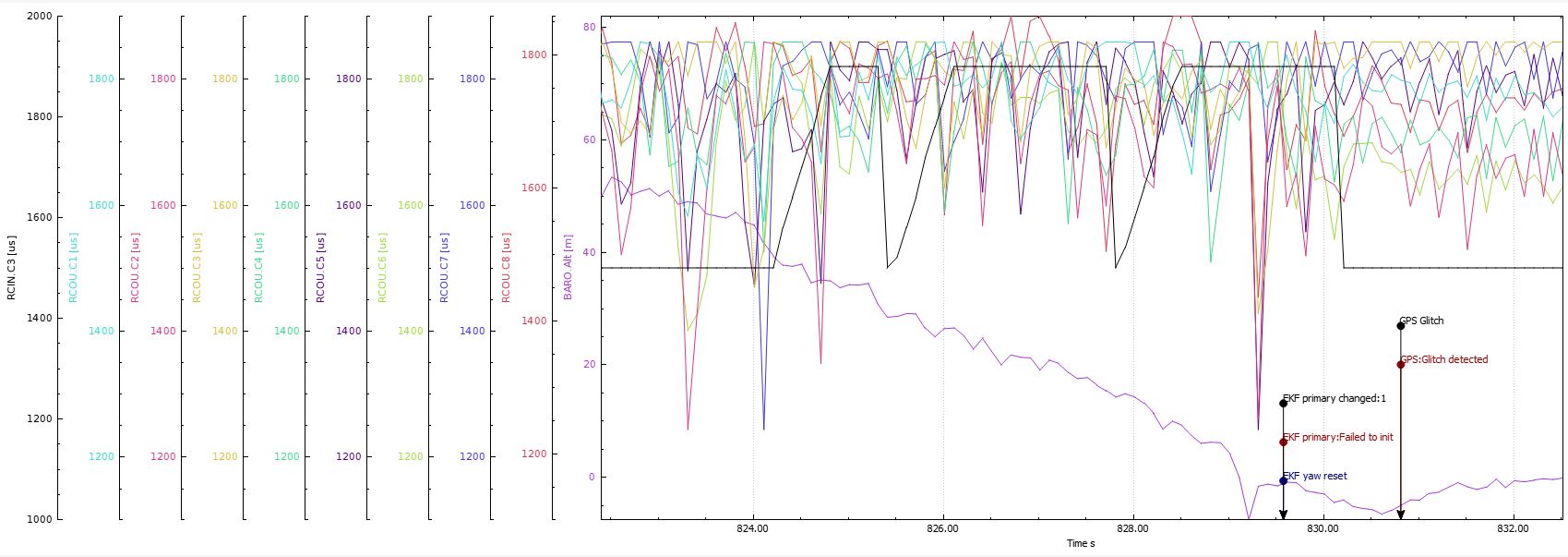
Please correct me if I am wrong. But all the time where the output is steady, the copter has nearly the same heading and was hovering at one spot. Look at the end, where is copter is looking to the opposite direction, here you can see the output is the other way around. Follow RC1 (blue)
I have seen the logs and I agree that there is a desync issue with the ESC. I had bad experiences with T-motor ESC with these desync problems, in my particular case was with T-motor T80A.
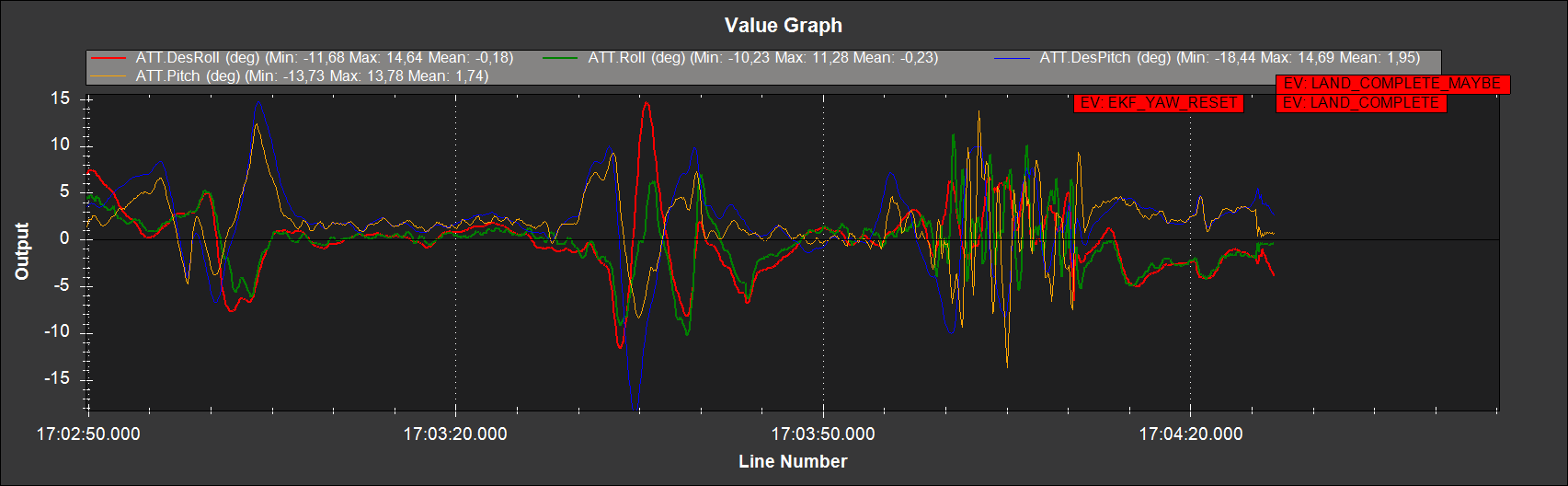
I see while descending, the current and desired pitch and roll don’t follow very well:
So what I think is that some of the ESC desync while descending, the FC always prioritize the stabilization before the altitude, that linked to the problem that there isn’t enough power to keep the drone in air because some motors are at maximum, the only and best thing that the FC can do is continue descending.
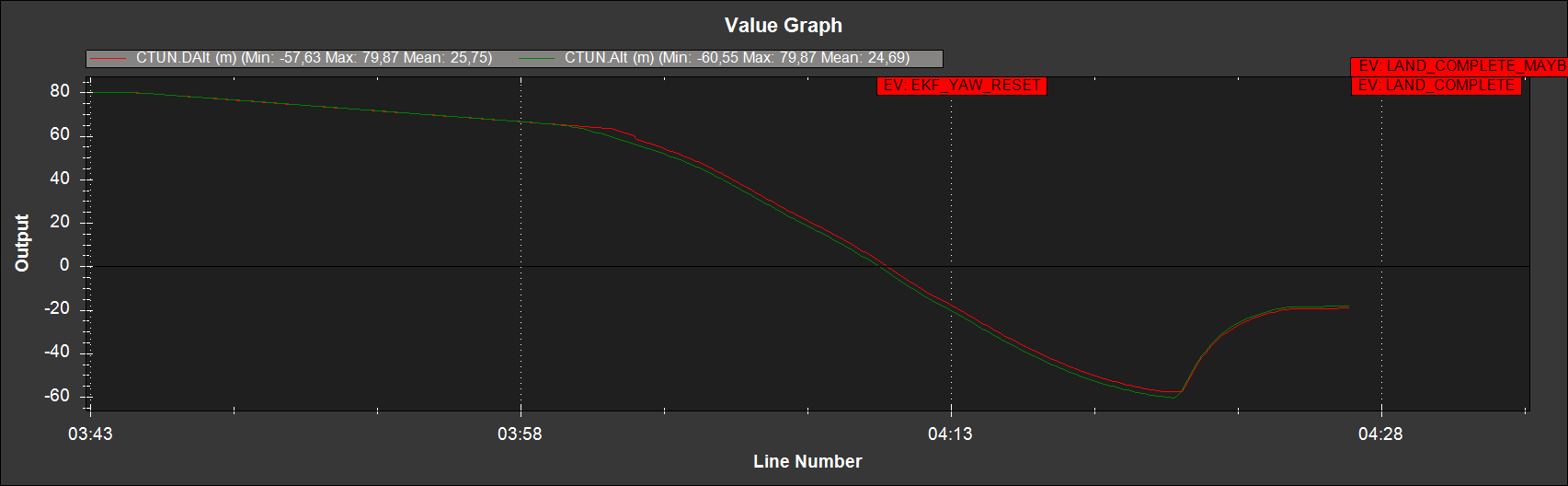
Check ThO% it went 100% when problems started. So FC commanded maximum available throttle and tried to ascend. However as @davidae said, stability has priority and it seems that the FC had trouble stabilize the copter, which can caused by motor desync. Also the battery voltage was below 20 volts when the problem started which is very low, and with a low KV motor it also makes stabilization difficult.
Thanks @davidae and @Eosbandi for your time and help!
This confirms my assumption that there are rare moments where the ESC loses its timing, especially on low battery. We already had the case where the drone caught itself again when it came down. That actually confirms that too. I think if we would switch to Lipo, the problem could already be gone, because the problem only occurs when the voltage drops below ~ 3.3V. Playing around with the timing of the ESC’s would also be a possibility. We will see…