I had a crash with my quadcopter. In auto-hold mod everything was good than i changed the mode to auto and things go different and i changed the mode to alt-hold again than it crashed.
I am trying to find the problem Can someone help me about it ?
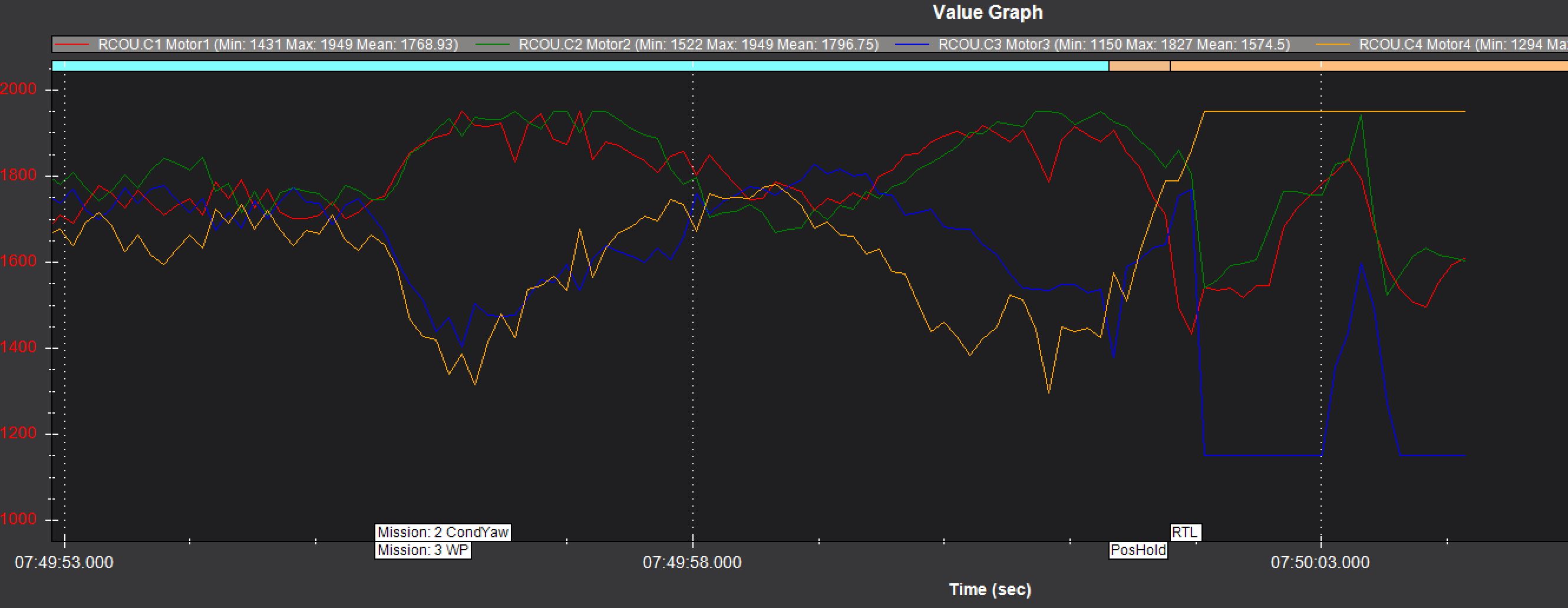
This craft is underpowered/overweight with an average PWM output of ~1750us and MOT_THST_HOVER value of 0.59. Then Motor 4 lost thrust, 3 dropped to compensate and it’s heading for the ground.
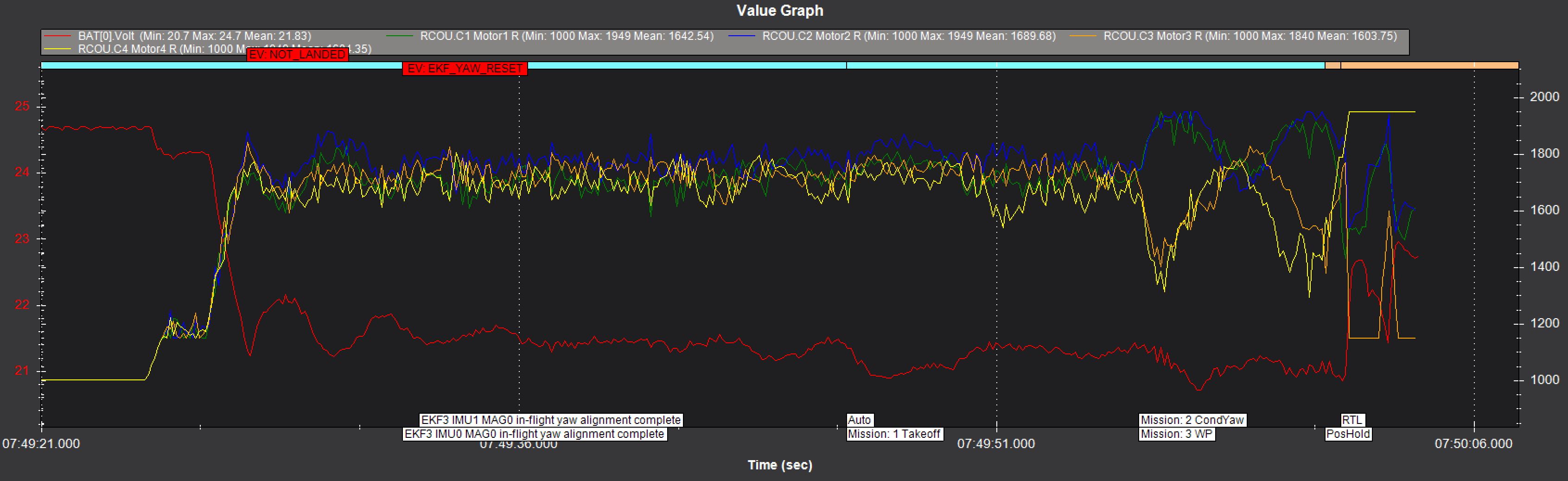
Battery sagging considerably also:
But it was all normal in Alt Hold mode everything changed in Auto mode and also we have enough battery when we started. 10.000 mah 6S 25C what to do? What is my problem
No it wasn’t. Normal at Hover for proper thrust/weight would be close to 1500us PWM output, your outputs are close to max. Describe the components on this craft and it’s take-off weight (with battery).