Hi
I need help analyzing my copter’s recent crash. The copter was hovering in Stabilize then I switched the copter to Alt Hold to begin the autotune procedure but the copter suddenly started increasing altitude rapidly so I switched back to stabilize to retake control and the copter eventually flipped over and crashed.
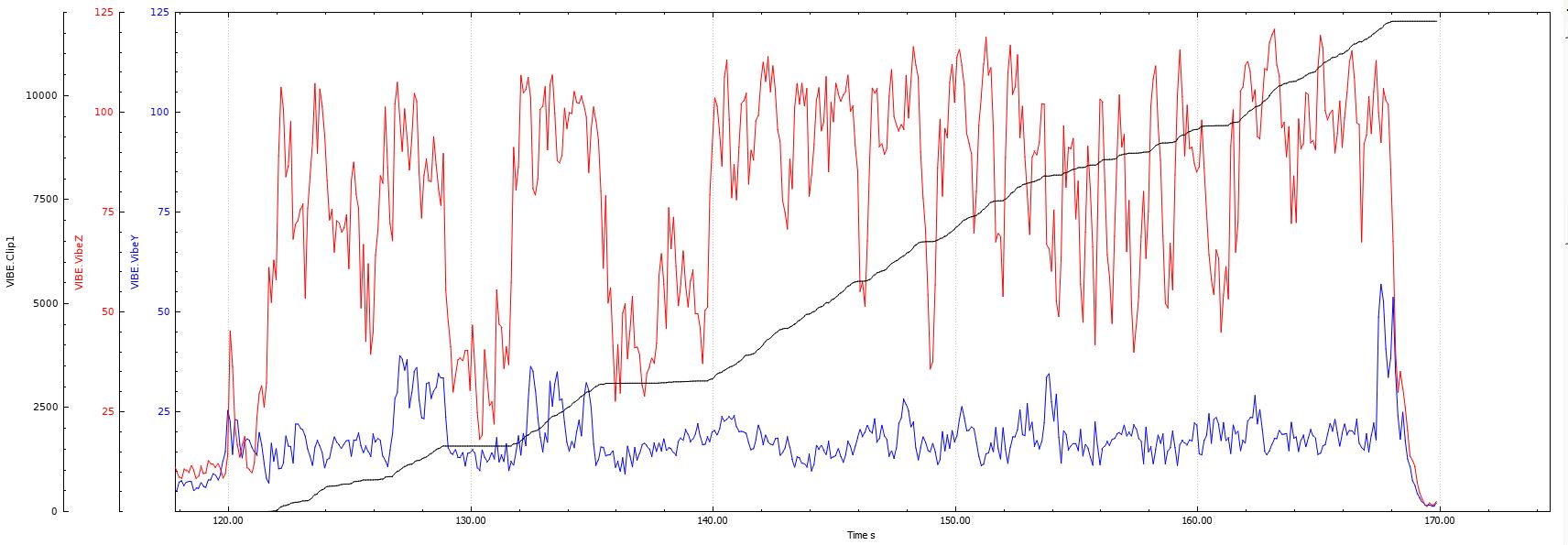
I believe the altitude increase was due to the high amount of vibrations in the z-axis which results in wrong EKF estimations.
Here is the log: 00000001.BIN (858.9 KB)
Thanks in advance
High in the Z-axis is an understatement.Z Vibe levels >100 and you managed to accumulate >100,000 clip events in < 1 minute. Why are you riunning V3.6.11? That version required a critical fix. Not that it’s related to this vibe issue.
Thanks @dkemxr
I don’t really know what causes this level of vibrations.
I mounted pixhawk like this picture on a vibration-damping plate. image1 image2
Balance the props? That wiring is a big mess and if any of it is stiff and not allowing the vibe mount to float it will be a problem. Like that large USB cable perhaps. In addition the arms on those frames are relatively flexible making vibe isolation difficult.
Is that blobs of RTV on the Vibe balls? Or worse, hot glue?
It looks like the hot glue is mechanically shorting out the balls. Hot Glue is a bad idea on a multirotor. It will eventually get brittle and fail. Double sided foam tape is good to mount the Flight Controller to the top vibe mount top plate.
 .
.