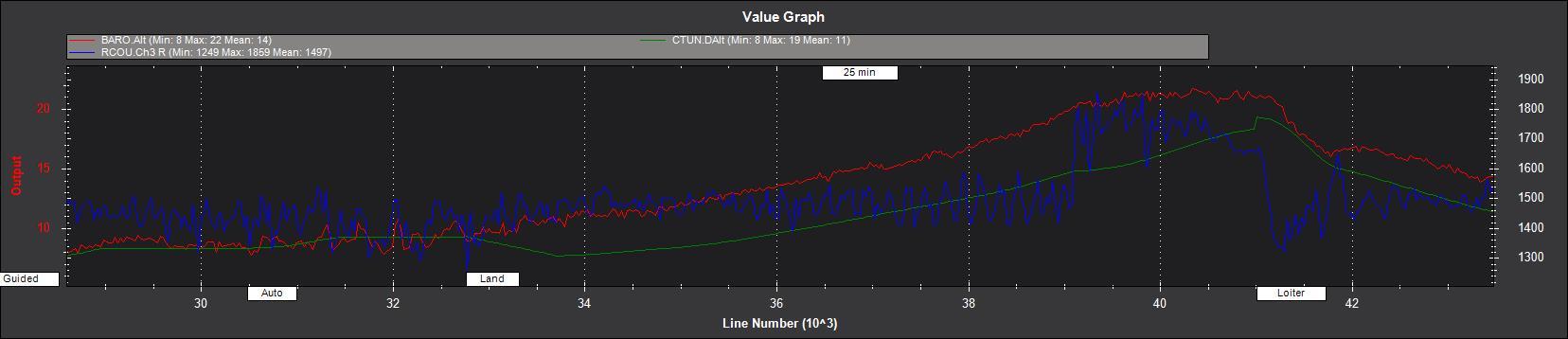
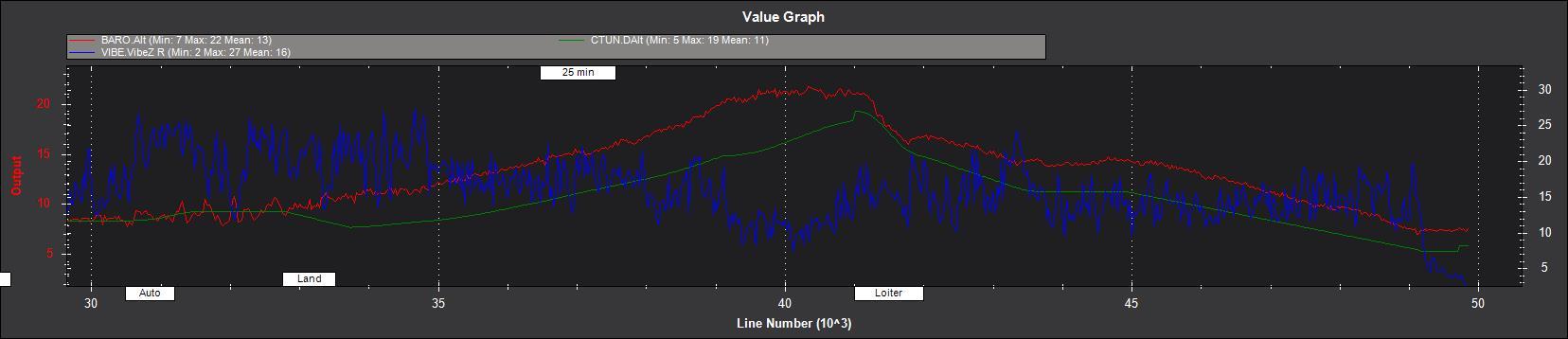
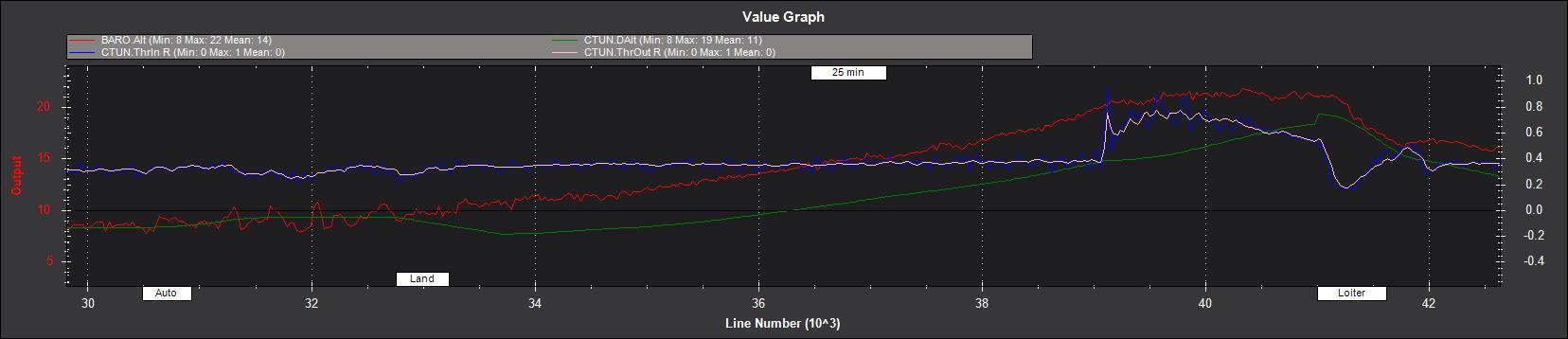
We had an odd incident happen recently where the copter decided to climb rather than descend when the LAND command was issued while in AUTO. It looks like the IMU corrected altitude was decreasing, but the baro altitude was increasing. I noticed the vibrations were a little high. This was in heavy wind as well.
Has anybody else seen this behavior? Was it fixed in more recent versions of 3.4?
It’s really all guess work without a log file. First thing to check is vibration levels but it could be something else though.
Also, it would be best to update to AC3.4-rc5. -rc1 is now very old and as far as I know, -rc5 should be better in every way compared with -rc1. we’ve resolved a lot of issues including issues with the EKF and it’s tough on the dev team to support really quite old pre-release versions.