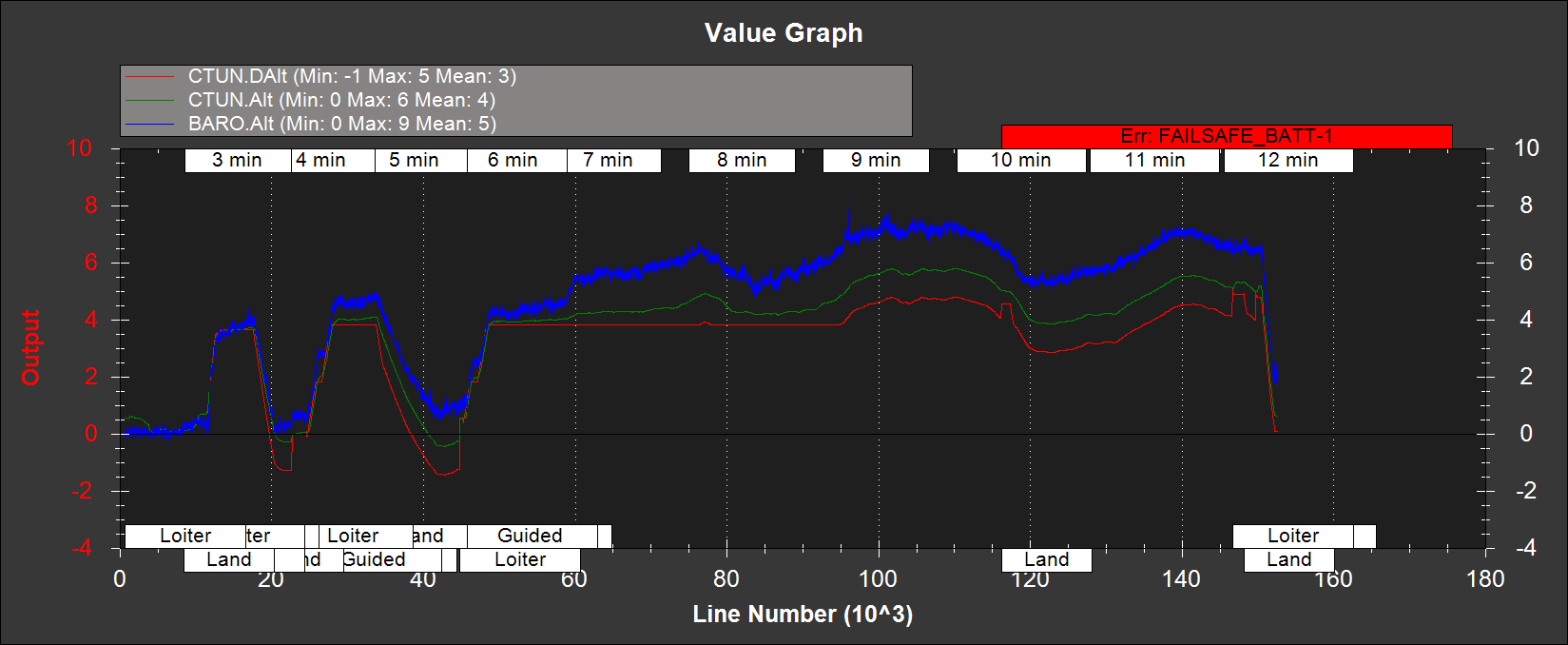
This is the second time the copter did not respond correctly to the Land command. This time, the copter just continued to hover when Land was initiated via a Battery FS and explicitly. It appears from the log, that every time we took off the error between the barometric altitude and the IMU corrected altitude became greater. The vibrations are very good on this platform (VIBEZ about 10). Here is the altitude history: