rmackay9
July 18, 2025, 4:47am
1
Copter-4.6.2 has been released as the stable/official version for multicopters and traditional helicopter and should be available for download from MP and QGC within a few hours of this post. Alternatively it can be downloaded directly from firmware.ardupilot.org .
The changes vs 4.6.1 can be found in the ReleaseNotes and copied below:
Board specific changes
AEDROX H7 support
FoxeerF405v2, GEPRCF745BTHD now use SPA06 barometer
GEPRC autopilots support QMC5883P compass
JFB110 SD card speed increased (resolves startup failure)
MicoAir743-AIO OSD type fixed
Sequre-H743/H743v2 autopilot support
Skystars H7HDv2 support
SPEDIX F405, H743 support
Copter/VTOL position control PSC_VELXY_D param default reduced from 0.5 to 0.25
Plane specific changes
DO_RETURN_PATH_START mission command support
LOITER_TURNS command with zero turns fixed (was skipping waypoint)
System ID feature implemented in Quadplane and enabled through an AUX switch
VTOLs get reduce speed scaler in assisted flight at low airspeed
VTOL transitions lose unnecessary bad descent protection
Bug Fixes and minor enhancements
BLHeli passthrough fixes
CAN race condition fixed on Linux and SITL
ChibiOS serial driver initialisation respects options to disable TX/RX DMA
ChibiOS tools fix to include bootloaders in hex files (no user impact)
Copter/VTOL AutoTune fix to restore gains when tuning aborts
CRSF bootstrap completes when not using passthrough
CRSF ground speed fixed (was about 20% off)
DroneCAN GPS ellipsoid alt only trusted if different from AMSL (avoids false impression of zero undulation)
DroneCAN Servos/ESCs fix when commanding output PWM of zero (previously could go to min or full reverse for bidir ESCs)
Fence and Rally point upload using older MISSION_ITEM messages fixed
Flash ECC check fixed on H7 boards
LD06/LD19 lidar get mode filter to reduce sensitivity to sunlight
Linux serial driver initial baud rate fixed
MPPT power module nullptr check added to prevent potential hardfault
Networking PPP made much more robust
“No ap_message for mavlink id” message removed on all boards except SITL
Parameter writes via FTP correctly obey parameter’s read-only setting
Scripting fix for null pointer dereferences when passing incorrect types to certain functions expecting strings
Sensor health reporting made threadsafe (previously could incorrectly report unhealthy)
Set-message-interval mavlink messages rejected if intervals below -1
Siyi ZT6 gets warning if using old camera firmware (should use 0.1.9 or higher)
SLCAN potential hardfault on arming fixed
SPLO6 baro initialisation fix
UBlox F9P driver fix for GPSs configured to never send MSG_STATUS
VTX hang when setting LowRace band fixed
Thanks to the devs and beta testers who contributed to this release!
8 Likes
Somehow I still do not see it in MP. Only 4.6.1 and 4.6.2beta2
1 Like
dkemxr
July 18, 2025, 6:25pm
4
Because it’s still not in the Repository. I don’t use MP to detect the board, just download the .apj file and flash it. But, Stable still shows as 4.6.1
1 Like
I did try to download, but when I open link in first post and look into it there is also only 4.6.1 available. No 4.6.2 to download.
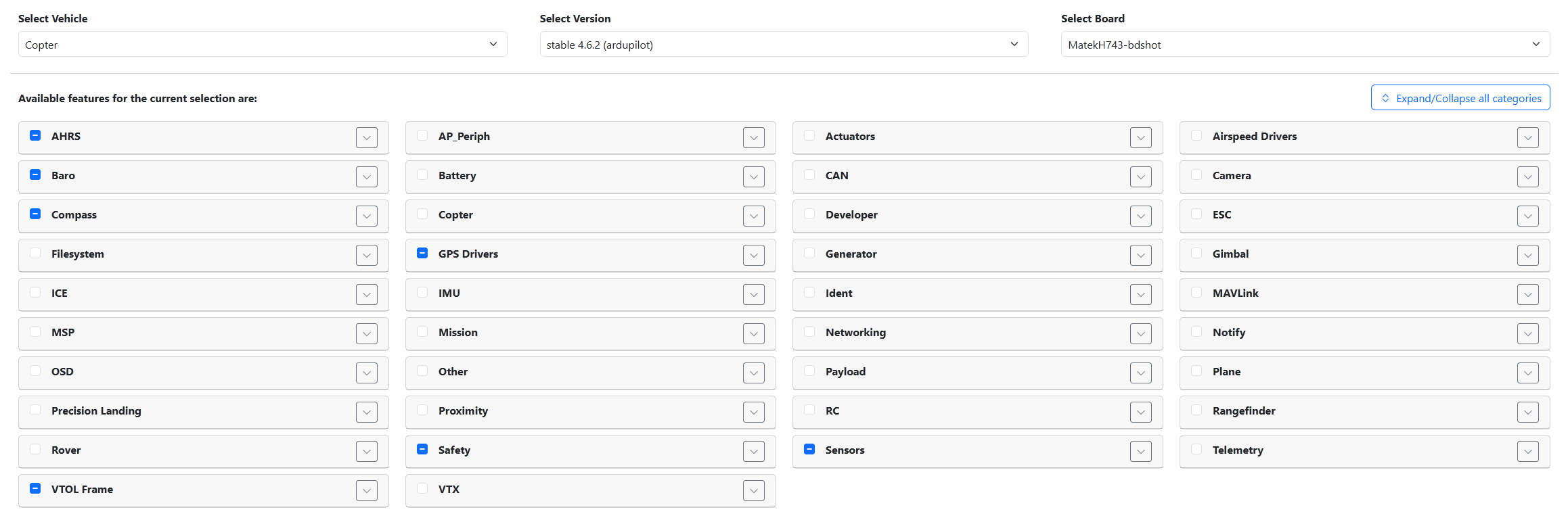
Also custom firmware builder seems to have issue with 4.6.2 as default feature set is almost empty, and identical for all boards.
@rmackay9 Seems something went wrong a bit with this release.
1 Like
rmackay9
July 19, 2025, 12:05am
7
Hi @Adam_Borowski , @dkemxr ,
Sorry, the release hasn’t shown up for some reason. Hopefully we can figure it out shortly
xfacta
July 20, 2025, 2:20am
8
4.6.2 releases appeared and installs working OK
2 Likes
Yuri_Rage
July 20, 2025, 5:13am
9
It got a little hung up in the final build/release process. All is well now.
1 Like
Quadzilla
July 20, 2025, 7:30am
10
I getting a odd Failsafe in Realflight could any new change make an internal error 0x00000?
Never mind I had EK3 turned off sorting another issue.
Webillo
July 28, 2025, 5:27pm
11
At last! Thanks a lot: no more annoying messages.
28/07/2025 19:09:20 : Frame: QUAD/BF_X
28/07/2025 19:09:20 : RCOut: DS600:1-4 NeoP:9
28/07/2025 19:09:20 : KakuteH7Mini-Nand 003F001D 35325119 38383730
28/07/2025 19:09:20 : ChibiOS: c6d0293e
28/07/2025 19:09:20 : ArduCopter V4.6.2 (1ebd4d99)
1 Like
Colindo
July 31, 2025, 3:13am
12
I just downloaded 4.6.2 and Yaapu stopped displaying data.
Quadzilla
July 31, 2025, 4:13am
13
Yaapu is an important tool. I hope this gets a looked at.
Yuri_Rage
July 31, 2025, 4:26am
14
@yaapu , any insight on this? I’ve had no issues with ExpressLRS and the Yaapu script from 4.2 all the way through current 4.7 master branch. But perhaps something has changed with FrSky support?
1 Like
Colindo
July 31, 2025, 5:49am
15
My transmitter is Taranis QX7 and the Yaapu version is X7 1.8.0
xfacta
July 31, 2025, 7:21am
16
TX16S Max/EdgeTX, RFD900 and TXMOD with Yaapu 20.0 is fine, no issue.
EDIT:
2 Likes
yaapu
July 31, 2025, 7:57am
17
good! was that sport or fport? can you test fport as well?
xfacta
July 31, 2025, 8:00am
18
I’ve got a couple of little R-XSR’s that just do S-Port
1 Like
dkemxr
July 31, 2025, 3:03pm
19
My Rover has an Fport connected R9MM Rx and it’s working well.
2 Likes
ggibbons
July 31, 2025, 4:29pm
20
I downloaded 4.6.2 to a Matek H743lite yesterday, works fine with Yaapu telemetry on a Frsky X20 Tx running Ethos with a Frsky RS Plus 2.4G receiver using Fport. I’ll try 4.6.2 on my R9 setup using a old MRO X2.1F777 FC next.