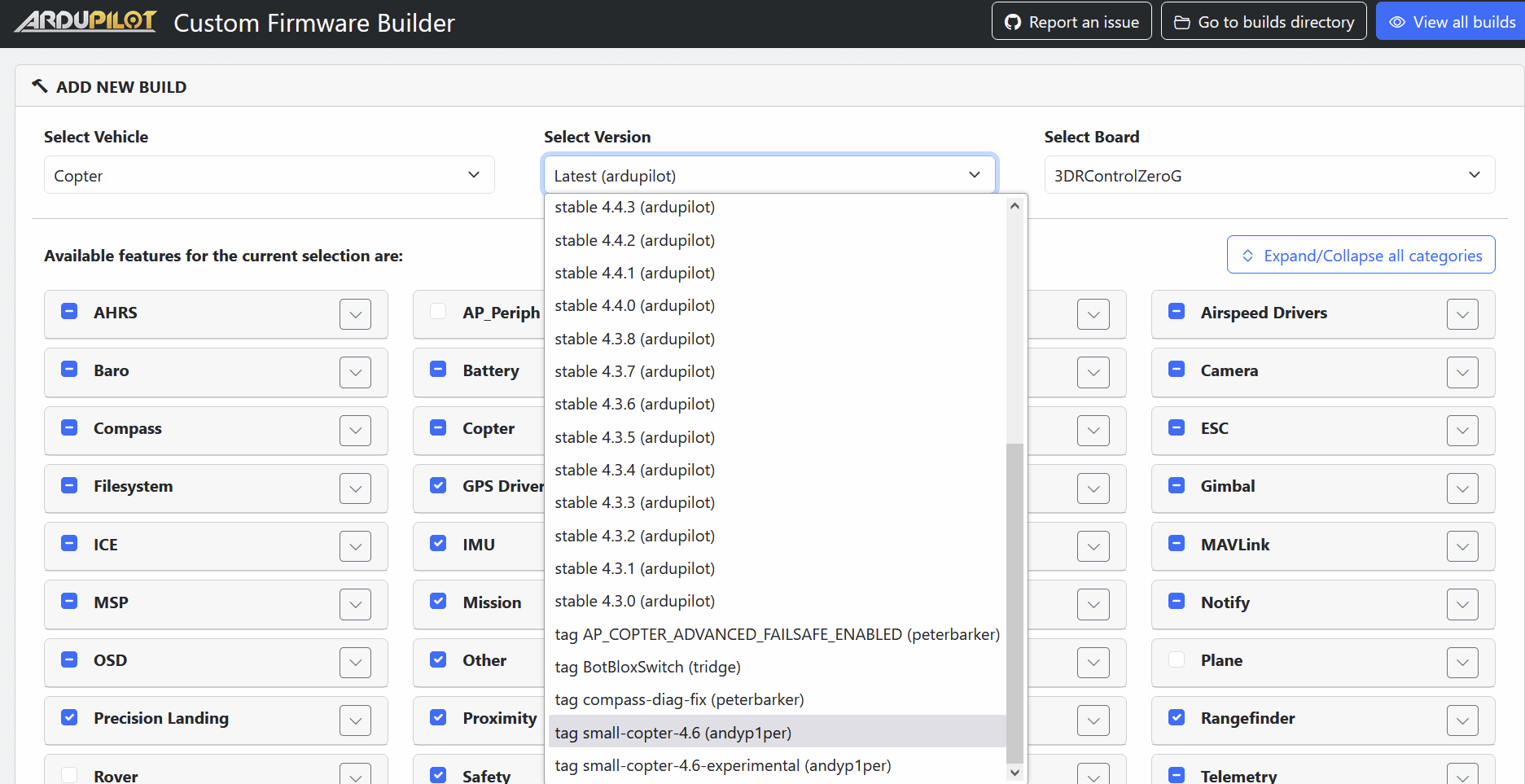
Copter-4.6.0-beta2 has been released and should be available for download using MP and QGC within a few hours using the “Beta firmwares” link. Alternatively it can be downloaded directly from firmware.ardupilot.org
The changes vs -beta1 are in the ReleaseNotes and copied below
Board specfic changes
FoxeerF405v2 supports BMP280 baro
KakuteH7, H7-Mini, H7-Wing, F4 support SPA06 baro
MUPilot support
SkySakura H743 support
TBS Lucid H7 support
VUAV-V7pro README documentation fixed
X-MAV AP-H743v2 CAN pin definition fixed
Copter specific enhancements and bug fixes
AutoTune fix for calc of maximum angular acceleration
Advanced Failsafe customer build server option
Plane related enhancements and bug fixes
QuadPlane fix for QLand getting stuck in pilot repositioning
QuikTune C++ conversion (allow running quiktun on F4 and f7 boards)
Takeoff direction fixed when no yaw source
TECS correctly handles home altitude changes
Bug Fixes and minor enhancements
AIRSPEED_AUTOCAL mavlink message only sent when required and fixed for 2nd sensor
CAN frame logging added to ease support
CRSF reconnection after failsafe fixed
EKF3 position and velocity resets default to user defined source
Ethernet IP address default 192.168.144.x
Fence autoenable fix when both RCn_OPTION=11/Fence and FENCE_AUTOENABLE = 3 (AutoEnableOnlyWhenArmed)
Fence pre-arm check that vehicle is within polygon fence
Fence handling of more than 256 items fixed
FFT protection against divide-by-zero in Jain estimator
Frsky telemetry apparent wind speed fixed
Inertial sensors stop sensor converging if motors arm
Inertial sensors check for changes to notch filters fixed
Real Time Clock allowed to shift forward when disarmed
ROS2/DDS get/set parameter service added
Scripting gets memory handling improvements
Scripting promote video-stream-information to applet
Topotek gimbal driver uses GIA message to retrieve current angle
Tramp VTX OSD power indicator fixed
As you can see from the list we’ve fixed quite a few issues but a few more still remain so there will certainly be a -beta3.
We very much appreciate any help we can get with beta testing because this is an important stage that helps us ensure a good smooth official release so thanks!
Tested this today on a T-Rex 700 Helicopter with QioTek Zealot H743. Tested the following modes
Stabilize
AltHold
Loiter
Auto (used Takeoff, Waypoints and Land commands)
I did some test flights with 4.6 Beta 2 Copter, Octaquad (X8), Cube Orange, DSHOT via IOMCU
Loiter
AltHold
Stabilise
RTL
SRTL
Autotune
Ascents, descents, plenty of maneuvers
Autotune did the best result on Yaw that I’ve seen. Everything else was good.
The only slight issue I found is the SERVO_BLH_RVMASK bitmask mapping to motors - it works for reversing a motor but it’s anyones guess how the bitmask maps to motor/servo channels. At least it’s consistent and never changes. Randy is aware.
Did some basic flight testing on Copter with mRo Pixracer Pro. ELRS and Yaapu telemetry, Remote ID, CAN bus, scripting, all fun protocol stuff. Didn’t encounter any issues!
Also did an autotune and some other modes and small missions.
Hi,
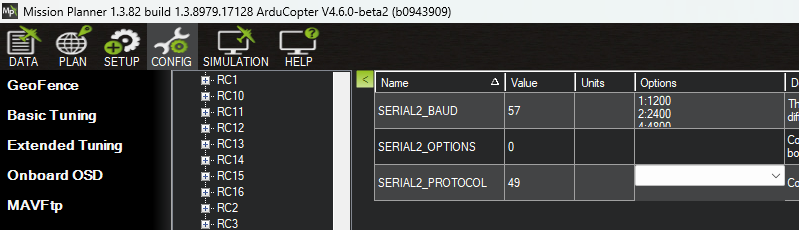
I’m having some issues with iBus Telemetry for FS-i6 RC.
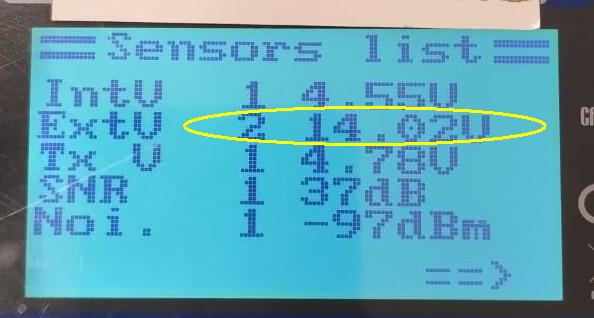
I have strictly followed the steps as shown on i-Bus telemetry page, but my radio can’t read any sensor.
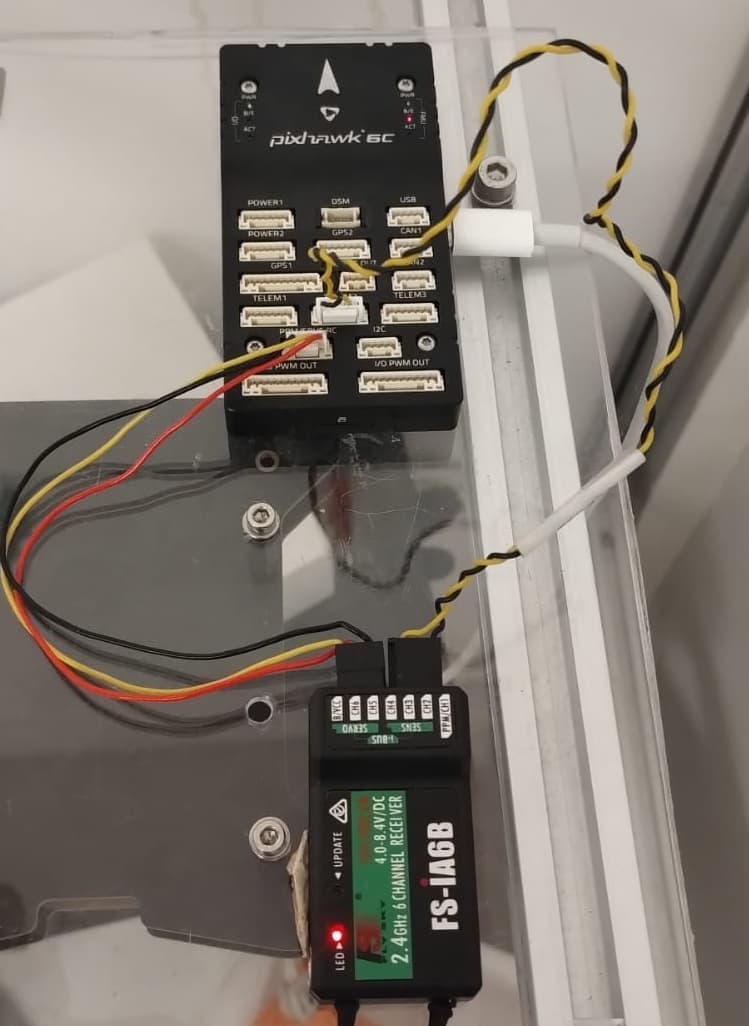
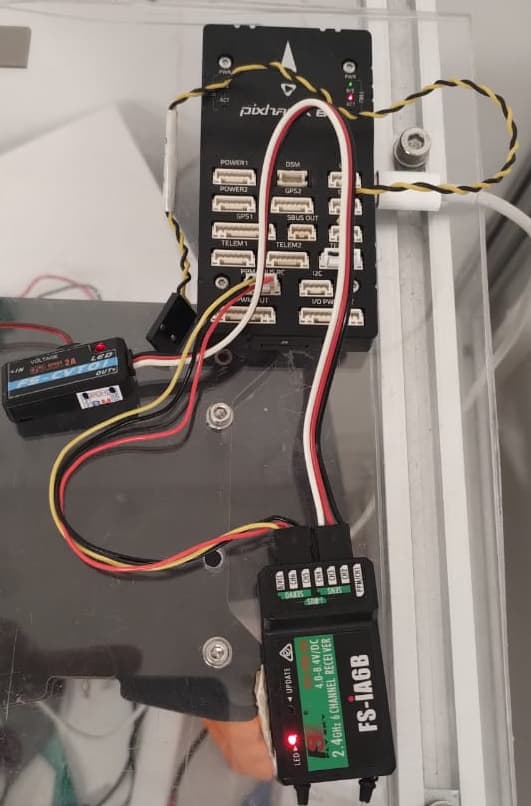
My setup (mounted on my desk, just for testing):
Firmware 4.6.0.beta2
Serial 2 (telem 2 port) configured as aforementioned
I have noted that the “49” option is not available on MP’s menu, but I have setted it anyway.
Thanks for the report. Here’s the PR that added support and I’ve put a request at the bottom to see if the original author or devs who reviewed the PR could chime in.
I see there is a Caddx gimbals support on master branch, and it seems to be working (at least with some basic tests I did). Is there any chance this will be included into 4.6 release, or just as stated in docs I would need to wait for 4.7?
Yes, I hope we can include the CADDX gimbal in 4.6 but I can’t yet promise 100% because there were some structural changes in master that could make backporting difficult.
Hi all. On my drones nice works even 4.7.0 Dev
I have some whishes. They be usefull for lot of people.
Add new Relay option: 3 POS switch can be used to “ON” Relay 1 when “High”, and “ON” Relay 2 when “Low”, at “Middle” both Relay “OFF”, Usefull to control different DC linear servos with Voltage polarity movement controll. F.e. submarine periscope Up/Dwn.
I realised that but without possibility to configurate Relay’s numbers. Because It custom SW.
possibility to make own VTX table in MP at least for 6 channels and switch between them using 6 pos switch.
Can I ask @peterbarker or somebody- what I need sent to VTX (Trump or SmartAudio) to change frequency? Channel, Band, Frequency, Power Level all together as one sequense?
Or just frequency? I can’t find explanation of IRC/ SA protocols.
Thanks.
PS, is it ok? After I added some new Params a described in Wiki, I need each time reload full parameter list in MP, MP said “Params number was changed, need refresh all params”
By the way- after Land Detector was changed in 4.5.+ lot of times we have trouble- drone won’t disarm after land, continued spin motors at iddle (throttle down), few secs later begin spin up itself, takeoff and crash in roll direction.
EKF Z source = Baro.
That can be vibrations obscuring the landing, and poor tuning. The poor tuning could be a result of the vibrations too.
I’ve seen poor GPS connections cause that too - the copter thinks it’s still moving.