Hi @Prof_Leandro,
Thanks for the report about SBUS output not working correctly. I’ve reproduced an SBus issue with 4.5.0 (and higher) so I hope it won’t be long before we find the cause and fix it.
FYI @andyp1per ('cuz you were also investigating)
Hi @Prof_Leandro,
Thanks for the report about SBUS output not working correctly. I’ve reproduced an SBus issue with 4.5.0 (and higher) so I hope it won’t be long before we find the cause and fix it.
FYI @andyp1per ('cuz you were also investigating)
ardurovers1.param (15.2 KB)
Hello @rmackay9 , I just tried with ardurover too, and I had the same issues, I attached my parameter file for your review, My TX of the sensor is connected to the RX of the pixhawk cube orange, and RX of the sensor is connected to the TX of the pixhawk cube orange.
Do you see any issues with the files or the connection?
Hi all, 4.5 and 4.5.1 new build is acting odd but really could be something i’m doing wrong. 1. A lot of twitching of the frame. 2 Loitor has an altitude climb like a flyaway switching to stabilize recovers… 3. EKF errors show movement in MP even when grounded. Last flight copter drifted and had an impact. I decided that i won’t do more work on this and rebuild from new.
Thinking it could be a Radio issue. The climb was repeatable.x4
Hi @Quadzilla,
Thanks for the report. I suspect it is environmental or frame related. We really haven’t made that many changes to the EKF or controllers in 4.5.x vs 4.4. Maybe try back-to-back tests with 4.4.4 and 4.5.1?
Re the SBUS out fix has gone into master and should be included in the next release which will be 4.5.2-beta1.
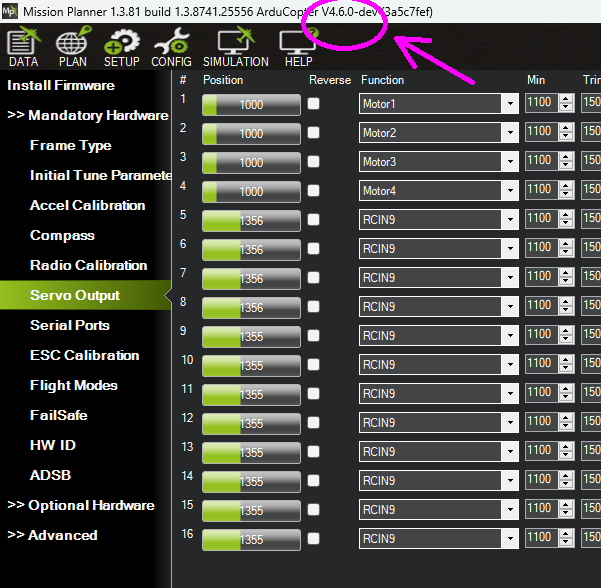
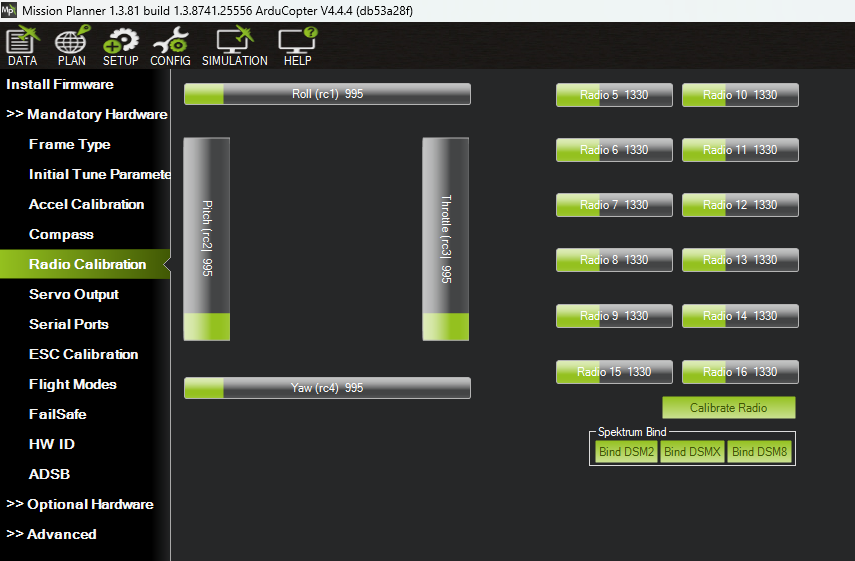
If you’d like to test the fix immediately (which would be very much appreciated) then you could load “master” (aka “latest”) onto the board using Mission Planner’s Firmware Install screen, just press Ctrl-Q and you should see the version under each icon change to 4.6.0-dev. Please note that this is a development version that hasn’t gone through beta testing so while it is probably safe, all we really need to know is that it’s resolved the Tarot gimbal control issues you were seeing.
Hi @rmackay9
Thank you for return.
The issue persists (and worse!).
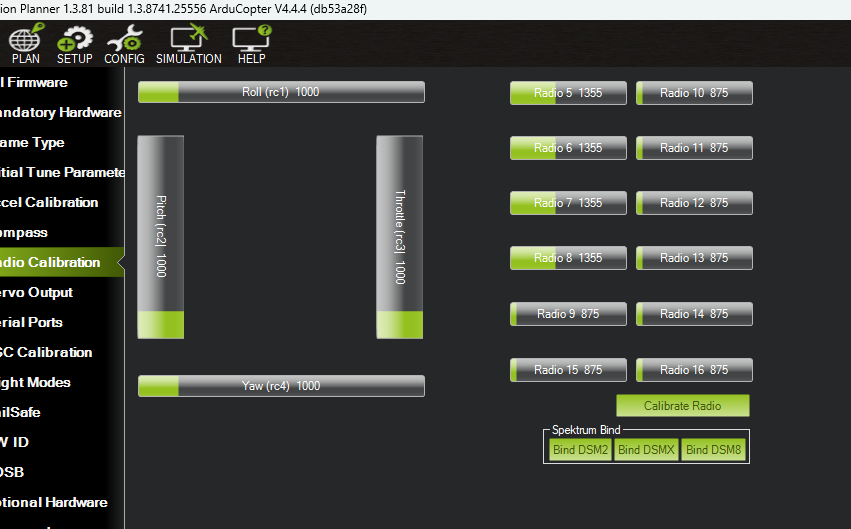
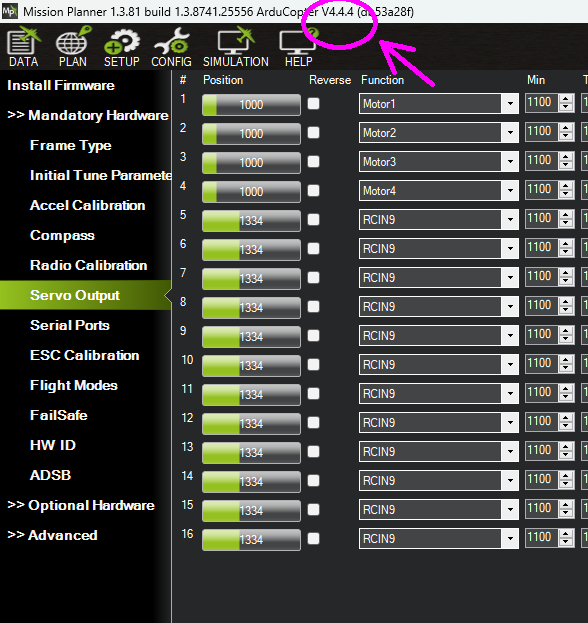
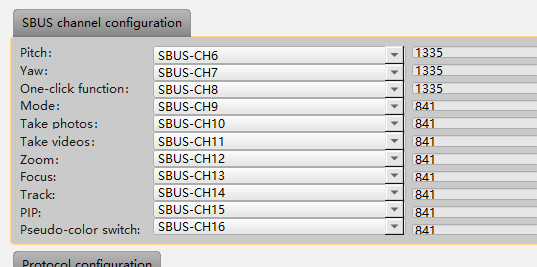
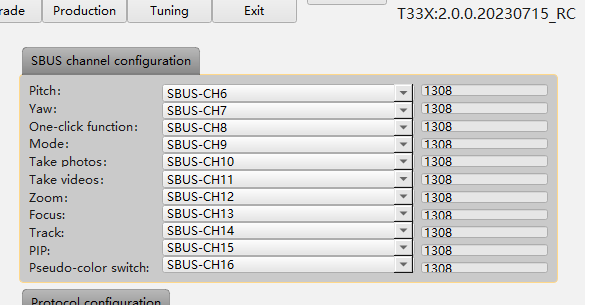
I have done the follow procedure:
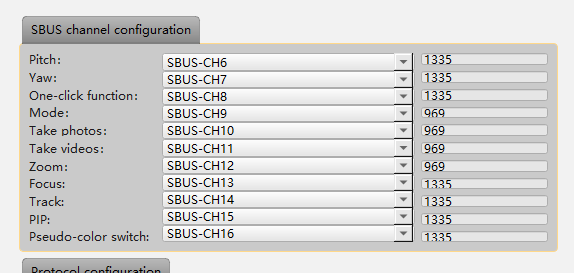
I do not care about the error (1355 in MP and 1335 in Gimbal’s software). The real trouble is about the fail output in channels 9~12 (all another channels works fine). Of course that I can avoid to use these channels (9~12) to operate my gimbal, but it is still a issue.
Sorry for extense report, but I think that more information would be better.
Hi @Prof_Leandro,
Thanks for the testing.
As you say, it appears we still have issues. I’ve ping’d @andyp1per and I think he’ll be looking into this further.
Hi @Leonardthall,
I’ve reproduce the problem and created an issue here.
Hi sorry for the delay. Here is the log (no need to set DISARM_DELAY to zero to my side to have the error).
2024-04-24 15-11-47-anon.log (983.2 KB)
Thanks @alex78,
Randy got me a log and I have worked out what has happened. Tricky little bugger ![]()
Has anyone had experience with the ORQA F405 3030 FC Flight Controller? Can this be reliably used with Arducopter and is it documented in the release
I did the port and Orqa have flown it successfully. It is a well made board and should work fine. I also have a PR pending for their new H743.