It has always been that way modulo bugs
OK, it’s a bit odd that @Alberto_Ds said, “I updated the fw from 4.4.4 stable to 4.5 without changing anything in terms of firmware or hardware parameters”
Anyway, I’m going to mark this item as resolved on the 4.5.0 issues list but please tell me if this is incorrect and it is not really resolved.
I have found another problem that I am not sure it is exclusive to 4.5.0. Basically I am trying to set up two gimbals in the same drone, an A8 mini and a Gremsy Zio. Everything is ok with the A8 mini until now. However, the Gremsy Zio is not recognized by controller. I get the error “Mount not Healthy” and this message “Camera: Gremsy.32 Zio Payload v2.32 fw:0.0.0.1”. I followed the setup instructions from Gremsy ![]()
Hi @rmackay9,
I confirm that I have only connected the quad to the planner and that I have only upgraded to 4.5. Furthermore, once again without having changed any hardware or firmware parameters, I returned to 4.4.4 and via the dedicated “ESC and motors” planner screen (not with the full parameters list) I entered the dshot600 protocol again as it was originally and I haven’t encountered the problem when flying normally. In any case, this weekend, I will check the parameters indicated by @andyp1per and proceed again with the FW 4.5 upgrade to see if the problem is solved and I will update the post.
Thank you very much
Hello @rmackay9 No problem, thank you.
I can confirm it is still not responding, can I please request if I could see how you are connecting to the cube?
I changed all parameters the way you mentioned, however I have had the same results.
My sensor was manufactured in January 2024, unsure if that matters if unless RPlidar has made any software changes from the time you got yours.
Please let me know if your sensor works? thank you for your support with this!
I was looking to use the sensor for indoor flights.
1 Like
Thank you for reply.
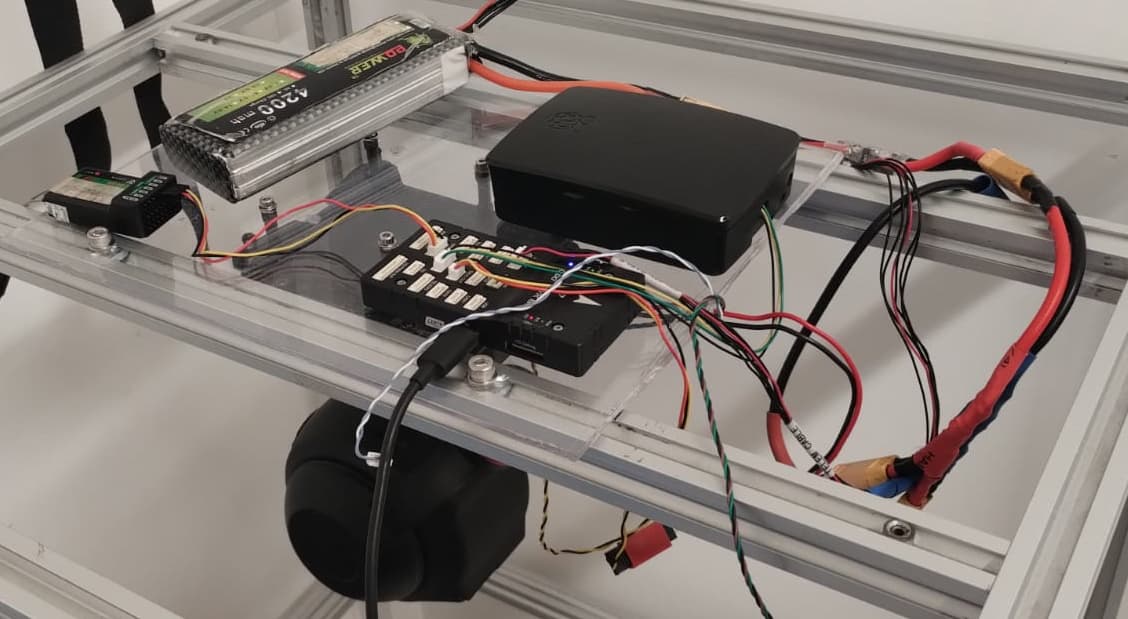
I am using the SBUS out bus of Pixhawk 6C.

I am now currently using the Tarot T26X gimbal, due to its capability to monitoring the SBUS “in” signal…
I have done the following test: configured SBUS out channels 6 to 16 as a “copy” of RC in 9 channel.

But I noted that the SBUS out is missing to update CH 9 to 12. All of anothers are working fine.
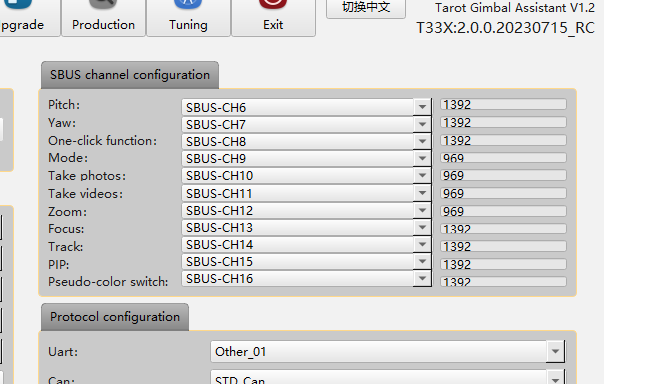
In the case of my previous post, when I hadn’t done this more qualified test, I was using channels 7, 10, 11 and 12 only… hence the impression that only channel 7 was working. In any case, I believe this report explained the problem better.
I would like to report another problem.
On another drone I’m working on, this one is configured to use hereflow instead of GPS, for indoor flying.
Everything was working fine with 4.4.4, but when I upgraded to 4.5, hereflow is not recognized by pixhawk (I’m using a pixhawk fmu3 2.4.8) on FC startup. After booting, I need to disconnect and reconnect the CAN cable for the pixhawk to recognize the device.
I was looking for power issues or cable malfunctions and found nothing wrong.
When I downgraded to 4.4.4, everything worked perfectly fine again. I would like to report another problem.
On another drone I’m working on, this one is configured to use hereflow instead of GPS, for indoor flying.
Everything was working fine with 4.4.4, but when I upgraded to 4.5, hereflow is not recognized by pixhawk (I’m using a pixhawk fmu3 2.4.8) on FC startup. After booting, I need to disconnect and reconnect the CAN cable for the pixhawk to recognize the device.
I was looking for power issues or cable malfunctions and found nothing wrong.
When I downgraded to 4.4.4 everything worked perfectly fine again. Absolutely no parameters were changed in this process.
Please can you post your full parameters. I’m still not quite sure what is working and what is not.
Of Course…
param_leandro.param (17.4 KB)
Try BRD_BOOT_DELAY,3000
or up to 5000. This gives the CAN device time to boot before Ardupilot starts interrogating the CAN bus.
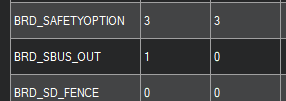
For your SBUS Out issue, you need to set BRD_SBUS_OUT to something other than zero
Also it is important to set
MOT_BAT_VOLT_MAX
MOT_BAT_VOLT_MIN
and it seems like you didnt use the Initial Parameters to set any of the important first-flight settings.
In MissionPlanner you can go into Initial Parameters and put in your prop size, battery cell count, and select “Suggested” and accept all.
2 Likes
I haven’t updated the zip file in the methodic blog post to support the 4.5.0 release yet.
But I have updated the MethodicConfigurator GUI. It supports the release and includes the updated zip file
2 Likes
Hi all,
@andyp1per @dkemxr @rmackay9
I did some tests and set the parameters as follows. But I actually get differences only by changing the MOT_PWM_TYPE, 2. Whatever I do if I set the MOT_PWM_TYPE, 6 the motors jerk without arming.
If I set MOT_PWM_TYPE, 6 with FW4.4.4 the motors run regularly. In my 4.5 setup it seems impossible to use DSHOT600?
SERVO_BLH_AUTO 0
SERVO_BLH_3DMASK0
SERVO_BLH_DEBUG 0
SERVO_BLH_MASK 0
SERVO_BLH_OTYPE 0
SERVO_BLH_POLES 14
SERVO_BLH_PORT 0
SERVO_BLH_RVMASK0
SERVO_BLH_TEST 0
SERVO_BLH_TMOUT 0
SERVO_BLH_TRATE 10
MOT_PWM_TYPE 6 2 ???
They are Blhei_S? If so why not flash Bluejay?
In any case set these:
SERVO_BLH_AUTO,1
MOT_PWM_TYPE,6
SERVO_DSHOT_ESC,2
1 Like
It works now, thanks Dave! ![]()
I believe this worked: SERVO_DSHOT_ESC,2 (was at 0). On 4.4.4 it didn’t cause a problem. My esc is a BL Heli_S and it’s exactly this, which I modified by excluding a voltage regulator to use Li Ions up to 2.5V.
What advantages could I have on a small 3" quad using Bluejay?
BDshot to drive the notch filter. There is Bdshot firmware for that board right?
Hi @Alberto_Ds,
OK, I’ve put it back on the active issues list.
1 Like
Hi @Aki_Kalantri,
Thanks for the feedback. So the next step is for me to test with my own S1.
1 Like
I don’t specifically see this ESC in the Bluejay wiki but it has the EMF8BB21F16G chip so in theory it could work. Thanks for the info ![]()
Hi @xfacta
Thanks for tips.
At first, your suggestion of BRD_BOOT_DELAY worked well, I will keep monitoring.
It’s still strange that only firmware 4.5.1 requires this parameter change (previous versions didn’t…)
About the SBUS_out issue… the BRD_SBUS_OUT is set in 1
The MOT_BAT_VOLT_MAX and MOT_BAT_VOLT_MIN parameters were not set as I am still not sure which drone I will install this setup on.
My priority now is to get the gimbal to operate with the controller. I am now working with this integration with the set installed without the aircraft.
1 Like
Thanks @xfacta and @Prof_Leandro for figuring out the fix for the Hereflow. I’ve added this to the 4.5.0 issues list.
1 Like