Can you post your parameters? Just so I understand your gimbal is attached to MAIN 7 PWM output?
Hi @rmackay9 and hi all,
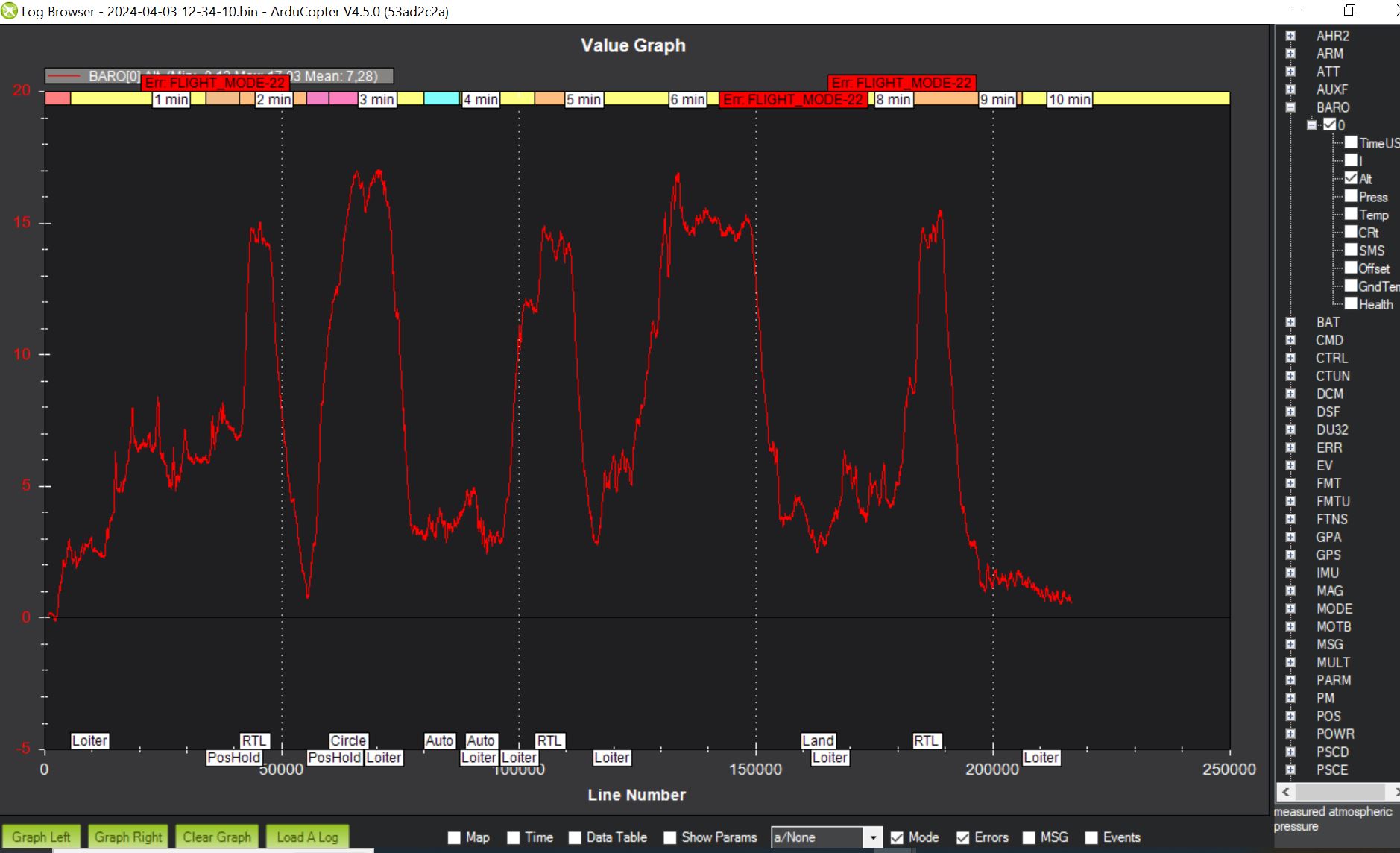
on my quad sub 250gr (omnibus nano v6 F4 1 MB hakrc esc 4in1 dshot 600, optical flow, gps, compass, baro), I updated the fw from 4.4.4 stable to 4.5 without changing anything in terms of firmware or hardware parameters.
with 4.5, as soon as the battery was connected, WITHOUT arming the quad the motors started to turn jerkily. I cocked but the quad didn’t fly (on yaapu telemetry it gave potential loss of thrust). I changed the esc protocol from dshot 600 to oneshot 125 and the problem seems to be gone. I flew and obtained the (anonymous) log that I attach. I’ve tried loiter, poshold, flowhold, RTL, circle, land, auto… with no problems. Then I landed and the quad wouldn’t let me arm. I had to detach and reattach the battery to fly again. I reinstalled stable 4.4.4 and the problems disappeared even with the dshot 600 protocol.
1 Like
That doesn’t sound good
1 Like
Hi @Aki_Kalantri,
Thanks for the log.
I wonder if I could ask you to downgrade to 4.4.4 and try again. This will allow us to separate whether this is a 4.5.0 issue or just a regular setup issue.
Hi @Alberto_Ds,
Thanks very much for the report. I’ve added it to the 4.5.0 issues list.
I suspect that @andyp1per will try and look into this somehow.
I guess this is the first time you’ve tried 4.5.0? You’ve never tried the betas have you?
Please can you post a .bin log?
1 Like
Hi @Andre_Freitas,
Re the mount scripting issue, any chance that you have a .bin file? Could you tell me which gimbal is being used.
If the issue is, as you suspect, the change to automatically change to RC_TARGETTING when the RC input changes then we either have a bug or the RC input assigned to the mount controls is changing by more than either 10 PWM value or the RCx_DZ value (whichever is larger).
The issue could be gimbal specific so while I don’t see it on my Siyi A8 it is possible that we’ve got a bug when implementing this for one of the other drivers.
BTW, on my CubeOrangePlus with a Siyi A8, I also tried changing mount_test.lua so that it only updated the gimbal targets every 5 seconds (I changed this line to 5000) and it all worked fine.
1 Like
Hi andy,
If the file already posted where I removed the GPS data with the function integrated into the mission planner doesn’t work, I’ll send you a link privately.
Thank you!
Also note in the flight mode 22 error log screen that it could be the flowhold which in reality worked almost as well as the GPS and at 15m altitude
You sent a .log file - need a .bin log please
1 Like
Hi Randy,
unfortunately I updated to 4.5 too confidently and didn’t pay attention to the beta I had already installed, but I think it was a beta before December 2023 and it worked well
1 Like
I am using the same gimbal as yours so the gimbal is not the problem.
I can also assure you that the RC input assigned to the mount controls is not changing because I tested that and also increased the DZ value just to check if that was the problem but no.
I can try to get a log but I am confident it is something related to the RC_TARGETTING new change
1 Like
It’s because you have SERVO_BLH_MASK set - you need to remove this. It takes precedence over MOT_PWM_TYPE and since you have SERVO_BLH_OTYPE set to 0 you will be getting PWM which I am sure your motors/ESCs are not expecting. SO the behaviour is correct.
2 Likes
Hello @rmackay9 same issue with 4.4.4 PRX1 no data, I have wired from the sensor to the pixhawk board with cube orange.
Does 4.4.4 support Rplidar S1? I assume thats why I had the issue for PRX1 no data in this case when I downgraded it?
I upgraded to 4.5.0 because it supported this sensor.
MOT_PWM_TYPE, 2
SERVO_BLH_MASK,15
SERVO_BLH_OTYPE,0
SERVO_DSHOT_ESC,0
Would seem to be generally misconfigured if you were trying for a Dshot protocol.
Flash Bluejay and configure for Bdshot.
1 Like
Just did flight with one of my tricopter’s 4.5 stable version and i can say all working fine and fly really good. Good job guys…
2 Likes
Hi @Aki_Kalantri,
Ah, sorry for leading you astray, indeed the S1 is only supported in 4.5.0 and higher so it wouldn’t work on 4.4.4.
AP is indeed not get any data from the sensor so this indicates that there’s probably some communication issue. You’re sure that the sensor is connected to Serial2/Telem2? I see that SERIAL3_PROTOCOL = 11 (Lidar360). It won’t matter but if you’re not using Serial3 then maybe it would be good to restore it to the default of 5 (GPS) and put the baud rate back to 230.
You could also try changing the SERIAL2_BAUD to 115 (and reboot the autopilot) to see if that works. It should be 256 but maybe this one is different.
If all this fails then I’ll see if I can find my S1 and test it.
1 Like
I suspect you’re right that it is related to the RC_TARGETING change but I re-tested it last night and couldn’t find any issue. A log will help me double check that it is not the RC input that is the issue.
If you tell me what autopilot you’re using, I’ll create a modified version that disables the new feature and we can test that to confirm this is the cause.
1 Like
Hi @andyp1per,
Thanks for the help analysing the glut of 4.5.0 issues that have appeared. So to be clear, you think the DShot600 issue is resolved? I guess you think that if @Alberto_Ds went back to 4.4.4 with the exact same parameter he would see the same behaviour?
Also do you think it’s reasonable that SERVO_BLH_MASK takes precedence over MOT_PWM_TYPE? That actually seems backwards to me.
2 Likes
I think I found the situation that causes this problem. Basically it is related to my script.
In this script I set param:set(‘RC6_OPTION’,214) and right below mount:set_angle_target(0, 0, 0, 0, false) all in the function update(). It seems like setting the channel for the mount and then the angle target right away is not working. If I set the angle_target in the next return of the function update() it works ok.
The “problem” is that this did not happen in 4.4.4 so I think it should be related to the RC_TARGETING change in 4.5.0 as previously said.
Edit: please test the following script with and without “param:set(‘RC6_OPTION’,214)” line and see if the gimbal allways works for you or is it just mine that does not work when the line is present in the code
Edit2: make sure RC6_OPTION was set to 213 (mount pitch) before running the script.
local aux = 0
function update () -- periodic function that will be called
if aux == 0 then
param:set('RC6_OPTION',214)
mount:set_angle_target(0, 0, 0, 90, false)
gcs:send_text(6, "Gimbal 90!")
aux = 1
end
return update, 20
end
gcs:send_text(6, "gimbal_control_test.lua is running")
return update()
1 Like
Hi dkemxr,
Is it possible for BLHeli_S esc with bluejay to have BDshot in AP4.5?. If so how to enable it for none 32 ESCs?