Copter-4.4.1-beta1 has been released for beta testing and can be installed using MP’s or QGC’s “beta firmwares” links. Alternatively it can be downloaded from firmware.ardupilot.org and then manually uploaded as a “custom firmware”.
Changes vs 4.4.0 are in the ReleaseNotes and copied below
Autopilot related fixes and enhancements
KakuteH7-wing get 8 bit directional dshot channel support
Luminousbee5 boards defaults updated
Navigator autopilot GPIOs fix (PWM output was broken)
Pixhawk6C Serial RTS lines pulled low on startup
QiotekZealotF427 and QiotekZealotH743 battery monitor default fixed
SDMODELH7V1 support
Driver enhancements
DroneCAN battery monitors allow reset of battery SoC
Himark DroneCAN servo support
Hobbywing DroneCAN ESC support
EKF3 high vibration handling improved with EK3_GLITCH_RADIUS option
Custom build server gets mission storage on SDCard selection
SITL default parameter handling bug fix
Any and all feedback on this beta release are greatly appreciated!
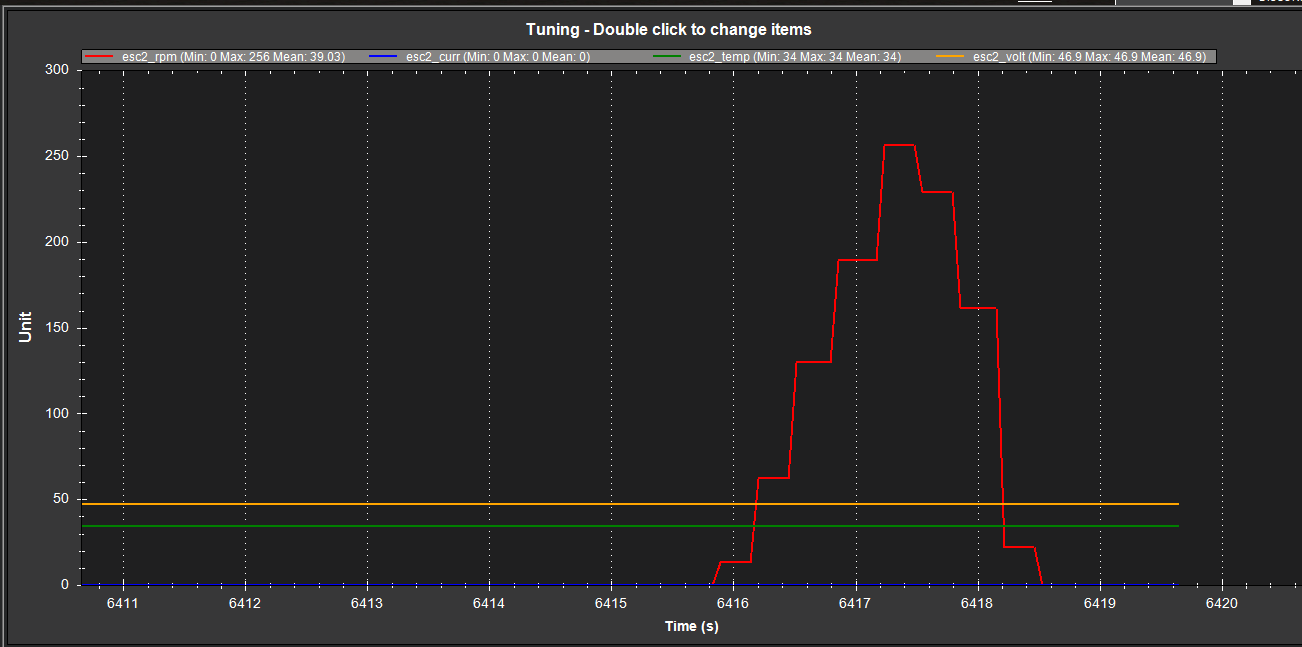
Yes, the Hobbywing DroneCAN ESCs report RPM, voltage, current and temperature. This is a test done earlier today where I spun up one motor for a moment.
Getting Battery 2 error but no Battery 2 was enabled. Some odd reading in YAAPU battery shows 60% but battery was drained triggering a failsafe. Fly’s great, install went well and Loiter was good. Ground data error reported. I will check more.
I decided to go from 3s to 4s on my green hornet yesterday. YAAPU seems better so probably a user error of voltage.
Of interest to some who use stock settings as the base is a simple battery change to 4S from 3S that works fine interduces some twitch. Not a new development at all I seen it before and I will tune it out.
Ok I figured this out. Its not actually a bug in yaapu but in CRSF. If you enable the “RX Battery Sensor” in the CRSF menu for the RX then the RX will send battery info as well as the flight controller using the same id and yaapu has no way to tell them apart. The solution is to not set this option.
Very good find. I also now getting a early low level message stating bat 1 is low, so fixing will be fantastic. I using the tx16s. wondering what the steps are.